

My review of bGeigie Nano from Safecast
I finally finished assembling, after more than a year, my bGeigie Nano. At over $400, this was by far the most expensive Arduino project I have built to date.
The feature-rich open-source Geiger counter is offered as a kit by Medcom for the price of $450 (of which, $75 is donated to Safecast organization). I stubbornly insisted on sourcing the parts on my own, to save a few bucks and to get a closer look at the process. Let me tell you: this may be the only kit out there where the components bought individually are as expensive as the kit itself! Obviously, this kit was not designed to make a profit.
Here is a price breakdown (for non-believers):
- PCB (OSHPark) - $17 (3 for $52)
- Pelican 1010 box (store) - $13
- Arduino Fio - $25
- GPS module - $40
- OpenLog - $25
- OLED display - $25
- laser-cut plates - $25
- sensor LND7317 - $150
- iRover HV supply - $35
- LiPo battery - $10
- SD card - $10
- other electronic components - $5
- hardware (standoffs, screws etc) - $5
- shipping (on some of the items) - $30
-----------------------------
Total = $415

Since it took me so long to build it, I forgot a lot of details (I know, I should have logged impressions along the way; that's why it's called "web log").
But here are a few things I can still remember:


The feature-rich open-source Geiger counter is offered as a kit by Medcom for the price of $450 (of which, $75 is donated to Safecast organization). I stubbornly insisted on sourcing the parts on my own, to save a few bucks and to get a closer look at the process. Let me tell you: this may be the only kit out there where the components bought individually are as expensive as the kit itself! Obviously, this kit was not designed to make a profit.
Here is a price breakdown (for non-believers):
- PCB (OSHPark) - $17 (3 for $52)
- Pelican 1010 box (store) - $13
- Arduino Fio - $25
- GPS module - $40
- OpenLog - $25
- OLED display - $25
- laser-cut plates - $25
- sensor LND7317 - $150
- iRover HV supply - $35
- LiPo battery - $10
- SD card - $10
- other electronic components - $5
- hardware (standoffs, screws etc) - $5
- shipping (on some of the items) - $30
-----------------------------
Total = $415
Since it took me so long to build it, I forgot a lot of details (I know, I should have logged impressions along the way; that's why it's called "web log").
But here are a few things I can still remember:
- the kit is pretty easy to build (once one has all components); geared towards the novice maker, the only challenge is to follow the assembly instructions, sometimes not very clear because it lacks details (for example, the spacers's sizes; although this does not matter for those who buy the kit); but it seems that the instructions are periodically updated and improved;
- the support and discussion forum is great; I got quick and helpful answers to all my questions;
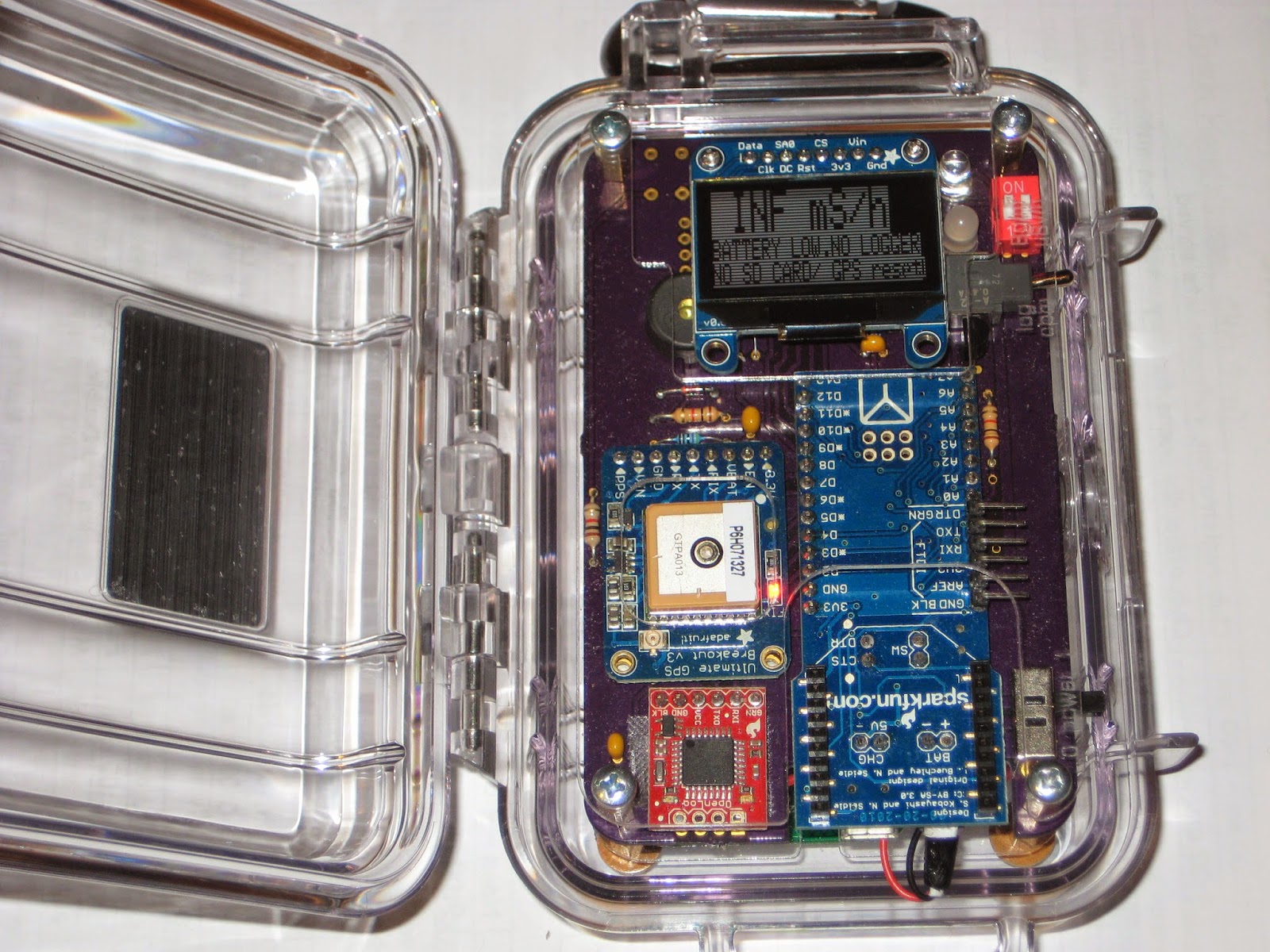
- the display is 128x64 OLED, even though the resolution used is 128x32 (notice in the photo above that every other line is blank)
- the sketch can barely fit in the 30KB program space of Fio's ATmega328 (I actually may have commented out some functionality to make it fit);
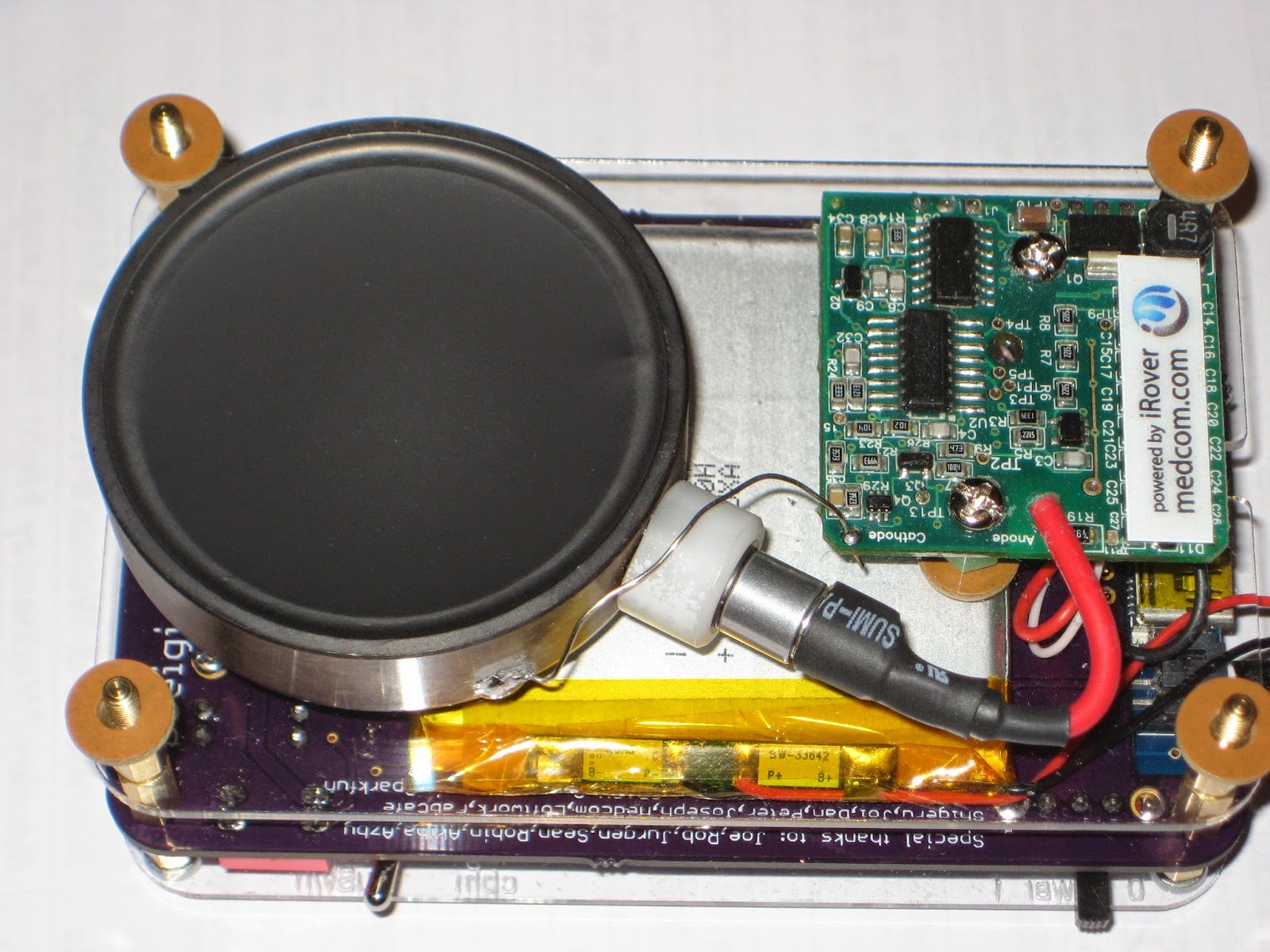
- at the time I started, the Geiger sensor was not offered for sale (now it is); I bought it directly from Medcom, together with the high-voltage power module; they did not include the protection grid that comes with the kit;
- a big surprise was that the assembly fits perfectly in the Pelican box, without using the rubber lining (which I had cut and prepared according to the instructions anyway). When I say "perfectly" I mean nothing rattles inside when the box is shaken. Truly remarkable. For those interested, I used M3x10mm standoffs between the 1.5mm plates, with the bottom one separated with a set of 1mm washers (see photo below, taken before I installed the battery and the sensor).
- the toggle switch at the top would be a better candidate as power switch than the slide switch currently used; maybe a future version will swap those two switches;
- bluetooth could be used to connect to smart phone rather than the current cable solution; but that would require a larger sketch running on a bigger processor (ATmega1284 would be a good candidate);
- although the modules used come with headers, once installed, they cannot be removed (because they are soldered, for mechanical/space reasons; the only exception is the OLED display); removable modules would make the device easier to debug and fix (if necessary);
- overall, it was a good experience; I used some modules for the first time; I learned a few things; it opened perspectives to new ideas; thank you guys!


































































































{kind=link}