Peter Higgs, the physicist who predicted the Higgs boson particle, has passed away at the age of 94 due to a blood disorder. His work proposing the particle — and showing how it helped give mass to some matter — won him the Noble price in 2013. The Higgs boson is informally referred to as the God particle, after a book by Nobel laureate Leon Lederman.
Higgs came up with the idea in the early 1960s as an attempt to explain why atoms have mass in the first place. The research didn’t get any traction in scientific journals, primarily because few understood the concept, but he was finally published in 1964. This was just a theory at the time, but led to a 50-year race to prove the Higgs boson particle actually exists.
Scientists hit pay dirt in 2012, thanks to physicists working at the Large Hadron Collider at CERN in Switzerland. It took four years of experiments, but the Higgs boson particle was finally discovered, proving his ideas and adding a major puzzle piece to the corpus of particle physics knowledge known as the Standard Model.
As a matter of fact, modern theoretical physicists have posited the existence of up to five Higgs boson particles that fill up what is now called the Higgs field. Scientists hope to use the Higgs boson to one day find proof for ever-elusive dark matter.
The Royal Swedish Academy of Sciences, which awards the Nobel, wrote about the importance of his discovery ahead of the ceremony in 2013. “Even when the universe seems empty this field is there. Without it, we would not exist, because it is from contact with the field that particles acquire mass.” The Nobel was shared with François Englert, a Belgian theoretical physicist whose work in 1964 contributed to the discovery.
"At the beginning I had no idea whether a discovery would be made in my lifetime”, Higgs once said. He leaves two sons, Chris and Jonny, his daughter-in-law Suzanne and two grandchildren. His former wife Jody, a linguistics professor, died in 2008.
This article originally appeared on Engadget at https://www.engadget.com/physicist-peter-higgs-who-predicted-the-god-particle-has-died-at-94-153635259.html?src=rss
It's difficult to describe the state of the universe's affairs back when the whole of everything was compressed to a size slightly smaller than the period at the end of this sentence — on account that the concepts of time and space literally didn't yet apply. But that challenge hasn't stopped pioneering theoretical astrophysicist, Dr. Laura Mersini-Houghton, from seeking knowledge at the edge of the known universe and beyond. In her new book, Before the Big Bang, Mersini-Houghton recounts her early life in communist Albania, her career as she rose to prominence in the male-dominated field of astrophysics and discusses her research into the multiverse which could fundamentally rewrite our understanding of reality.
Scientific investigations of problems like the creation of the universe, which we can neither observe nor reproduce and test in a lab, are similar to detective work in that they rely on intuition as well as evidence. Like a detective, as pieces of the puzzle start falling into place, researchers can intuitively sense the answer is close. This was the feeling I had as Rich and I tried to figure out how we could test our theory about the multiverse. Rationally, it seemed like a long shot, but intuitively, it seemed achievable.
Finally, a potential solution hit me. I realized that the key to testing and validating this theory was hidden in quantum entanglement — because decoherence and entanglement were two sides of the same coin! I could rewind the creation story all the way back to its quantum-landscape roots, when our wave-universe was entangled with others.
I already knew that the separation — the decoherence — of the branches of the wave function of the universe (which then become individual universes) was triggered by their entanglement with the environmental bath of fluctuations. Now I wondered if we could calculate and find any traces of this early entanglement imprinted on our sky today.
This might sound like a contradiction. How could our universe possibly still be entangled with all the other universes all these eons after the Big Bang? Our universe must have separated from them in its quantum infancy. But as I wrestled with these issues, I realized that it was possible to have a universe that had long since decohered but that also retained its infantile “dents” — minor changes in shape caused by the interaction with other surviving universes that had been entangled with ours during the earliest moments — as identifiable birthmarks. The scars of its initial entanglement should still be observable in our universe today.
The key was in the timing. Our wave-universe was decohering around the same time as the next stage, the particle universe, was going through its own cosmic inflation and coming into existence. Everything we observe in our sky today was seeded from the primordial fluctuations produced in those first moments, which take place at the smallest of units of measurable time, far less than a second. In principle, during those moments, as entanglement was being wiped out, its signatures could have been stamped on the inflaton and its fluctuations. There was a chance that the sort of scars that I was imagining had formed during this brief period. And if they had, they should be visible in the skies.
Understanding how scars formed from entanglement is less complicated than you might imagine. I started by trying to create a mental picture of the entanglement’s scarring of our sky. I visualized all the surviving universes from the branches of the wave function of the universe, including ours, as a bunch of particles spread around the quantum multiverse. Because they all contain mass and energy, they interact with (pull on) one another gravitationally, just as Newton’s apple had its path of motion curved by interacting with the Earth’s mass, thus guiding it to the ground. However, the apple was also being pulled on by the moon, the sun, all the other planets in our solar system, and all the stars in the universe. The Earth’s mass has the strongest force, but that does not mean these other forces do not exist. The net effect that entanglement left on our sky is captured by the combined pulling on our universe by other infant universes. Similar to the weak pulling from stars on the famous apple, at present, the signs of entanglement in our universe are incredibly small relative to the signs from cosmic inflation. But they are still there!
I will admit it... I was excited by the mere thought that I potentially had a way to glimpse beyond our horizon and before the Big Bang! Through my proposal of calculating and tracking entanglement in our sky, I may very well have pinned down, for the very first time, a way of testing the multiverse. What thrilled me most about this idea was its potential for making possible what for centuries we thought was impossible — an observational window to glimpse in space and in time beyond our universe into the multiverse. Our expanding universe provides the best cosmic laboratory for hunting down information about its infancy because everything we observe at large scales in our universe today was also present at its beginning. The basic elements of our universe do not vanish over time; they simply rescale their size with the expansion of the universe.
And here is why I thought of using quantum entanglement as the litmus test for our theory: Quantum theory contains a near-sacred principle known as “unitarity,” which states that no information about a system can ever be lost. Unitarity is a law of information conservation. It means that signs of the earlier quantum entanglement of our universe with the other surviving universes must still exist today. Thus, despite decoherence, entanglement can never be wiped from our universe’s memory; it is stored in its original DNA. Moreover, these signs have been encoded in our sky since its infancy, since the time the universe started as a wave on the landscape. Traces of this earlier entanglement would simply stretch out with the expansion of the universe as the universe became a much larger version of its infant self.
I was concerned that these signatures, which have been stretched by inflation and the expansion of the universe, would be quite weak. But on the basis of unitarity, I believed that however weak they were, they were preserved somewhere in our sky in the form of local violations or deviations from uniformity and homogeneity predicted by cosmic inflation.
Rich and I decided to calculate the effect of quantum entanglement on our universe to find out if any traces were left behind, then fast-forward them from infancy to the present and derive predictions for what kind of scars we should be looking for in our sky. If we could identify where we needed to look for them, we could test them by comparing them with actual observations.
Rich and I started on this investigation with help from a physicist in Tokyo, Tomo Takahashi. I first got to know Tomo at UNC Chapel Hill in 2004 when we overlapped by one year. He was a postdoc about to take a faculty position in Japan, and I had just arrived at UNC. We enjoyed interacting, and I saw the high standards Tomo maintained for his work and his incredible attention to detail. I knew he was familiar with the computer simulation program that we needed in order to compare the predictions based on our theory with actual data about matter and radiation signatures in the universe. In 2005, I called Tomo, and he agreed to collaborate with us.
Rich, Tomo, and I decided that the best place to begin our search was in the CMB — cosmic microwave background, the afterglow from the Big Bang. CMB is the oldest light in the universe, a universal “ether” permeating the entire cosmos throughout its history. As such, it contains a sort of exclusive record of the first millisecond in the life of the universe. And this silent witness of creation is still all around us today, making it an invaluable cosmic lab.
The energy of the CMB photons in our present universe is quite low; their frequencies peak around the microwave range (160 gigahertz), much like the photons in your kitchen microwave when you warm your food. Three major international scientific experiments — the COBE, WMAP, and Planck satellites (with a fourth one on the way), dating from the 1990s to the present — have measured the CMB and its much weaker fluctuations to exquisite precision. We even encounter CMB photons here on Earth. Indeed, seeing and hearing CMB used to be an everyday experience in the era of old TV sets: when changing channels, the viewer would experience the CMB signal in the form of static — the blurry, buzzing gray and white specks that appeared on the TV screen.
But if our universe started purely from energy, what can we see in the CMB photons that gives us a nascent image of the universe? Here, quantum theory, specifically Heisenberg’s uncertainty principle, provides the answer. According to the uncertainly principle, quantum uncertainty, displayed as fluctuations in the initial energy of inflation, is unavoidable. When the universe stops inflating, it is suddenly filled with waves of quantum fluctuations of the inflaton energy. The whole range of fluctuations, some with mass and some without, are known as density perturbations. The shorter waves in this spectrum, those that fit inside the universe, become photons or particles, depending on their mass (reflecting the phenomenon of wave-particle duality).
The tiny tremors in the fabric of the universe that induce weak ripples or vibrations in the gravitational field, what are known as primordial gravitational waves, hold information on what particular model of inflation took place. They are incredibly small, at one part in about ten billion of the strength of the CMB spectrum, and therefore are much harder to observe. But they are preserved in the CMB.
The Large Hadron Collider, the particle accelerator that enabled the discovery of the Higgs boson, is back in action after over three years in hiatus. CERN shut the accelerator down for maintenance and upgrade work that was extended due to delays caused by the COVID-19 pandemic. Now, it's ready to smash particles for various research projects throughout its third run that's scheduled to last until 2026. In fact, two beams of protons had already circulated in opposite directions around the 27-kilometer collider as of April 22nd at 12:16 CEST (6:16AM Eastern Time).
It's just a start, however: The beams contained a relatively small number of protons and circulated at 450 billion electronvolts. The LHC team will ramp up the energy and intensity of the beams until the accelerator can perform collisions at a record energy of 13.6 trillion electronvolts.
Mike Lamont, CERN's Director for Accelerators and Technology, said:
"The machines and facilities underwent major upgrades during the second long shutdown of CERN's accelerator complex. The LHC itself has undergone an extensive consolidation programme and will now operate at an even higher energy and, thanks to major improvements in the injector complex, it will deliver significantly more data to the upgraded LHC experiments."
Research teams using the accelerator for their studies are expecting to be able to perform a lot more collisions — one, in particular, is expecting a 50 times increase — thanks to the upgrade. The more powerful LHC will allow scientists to study the Higgs boson more closely and to resume their hunt for a particle that proves the existence of dark matter with a more capable tool at hand.
At the moment, dark matter is but a hypothetical form of matter that's believed to be five times more prevalent than its ordinary counterpart. It's invisible, doesn't reflect or emit light, and all attempts at looking for it have so far been unsuccessful. LHC researchers have narrowed down the regions where the particle may be hidden, though, and the upgraded accelerator could bring us closer to its discovery. To note, CERN previously approved plans to build a more powerful $23 billion super-collider that's 100 km in circumference, but its construction isn't expected to begin until 2038.
Gene Roddenberry was a man ahead of his time, accurately predicting the development of fantastical gadgets like flip phones, tablet computers, Bluetooth and bionic eyes — even tractor beams. But one technology Roddenberry called for in the 1960s has yet to make it off the screen: teleportation. It's not only that "we just don't have enough power," as Scotty would say, we also lack the fundamental knowledge base to make it a reality. For now, at least. In their latest book, Frequently Asked Questions about the Universe, Jorge Cham and Daniel Whiteson delve into this and a host of other quandaries facing humanity — from whether there's an afterlife, why aliens haven't made contact with us yet, or if our observable existence is actually a computer simulation.
If your dream of teleportation is to be here in one moment, and then be in a totally different place the next moment, then we are sad to tell you right off the bat that this is impossible. Unfortunately, physics has some pretty hard rules about anything happening instantaneously. Anything that happens (an effect) has to have a cause, which in turn requires the transmission of information. Think about it: in order for two things to be causally related to each other (like you disappearing here and you appearing somewhere else), they have to somehow talk to each other. And in this universe, everything, including information, has a speed limit.
Information has to travel through space just like everything else, and the fastest anything can travel in this universe is the speed of light. Really, the speed of light should have been called the “speed of information” or “the universe’s speed limit.” It’s baked into relativity and the very idea of cause and effect, which are at the heart of physics.
Even gravity can’t move faster than light. The Earth doesn’t feel gravity from where the Sun is right now; it feels gravity from where the Sun was eight minutes ago. That’s how long it takes information to travel the ninety-three million miles between here and there. If the Sun disappeared (teleporting off for its own vacation), the Earth would continue in its normal orbit for eight minutes before realizing that the Sun was gone.
So the idea that you can disappear in one place and reappear in another place instantly is pretty much out of the question. Something has to happen in between, and that something can’t move faster than light.
Fortunately, most of us aren’t such sticklers when it comes to the definition of “teleportation.” Most of us will take “almost instantly” or “in the blink of an eye” or even “as fast as the laws of physics will allow” for our teleportation needs. If that’s the case, then there are two options for making a teleportation machine work:
1. Your teleportation machine could transmit you to your destination at the speed of light.
2. Your teleportation machine could somehow shorten the distance between where you are and where you want to go.
Option #2 is what you might call the “portal” type of teleportation. In movies, it would be the kind of teleportation that opens up a doorway, usually through a wormhole or some kind of extradimensional subspace, that you step through to find yourself somewhere else. Wormholes are theoretical tunnels that connect points in space that are far away, and physicists have definitely proposed the existence of multiple dimensions beyond the three we are familiar with.
Sadly, both of these concepts are still very much theoretical. We haven’t actually seen a wormhole, nor do we have any idea how to open one or control where it leads. And extra dimensions aren’t really something you can move into. They only represent extra ways in which your particles might be able to wiggle.
Much more interesting to talk about is Option #1, which, as it turns out, might actually be something we can do in the near future.
Getting There at Light Speed
If we can’t appear in other places instantly, or take shortcuts through space, can we at least get there as fast as possible? The top speed of the universe, three hundred million meters per second, is plenty fast to cut your commute down to a fraction of a second and make trips to the stars take years instead of decades or millennia. Speed-of-light teleportation would still be awesome.
To do that, you might imagine a machine that somehow takes your body and then pushes it at the speed of light to your destination. Unfortunately, there’s a big problem with this idea, and it’s that you’re too heavy. The truth is that you’re too massive to ever travel at the speed of light. First, it would take an enormous amount of time and energy just to accelerate all the particles in your body (whether assembled or broken up somehow) to speeds that are close to the speed of light. And second, you would never get to the speed of light. It doesn’t matter how much you’ve been dieting or working on your CrossFit; nothing that has any mass can ever travel at the speed of light.
Particles like electrons and quarks, the building blocks of your atoms, have mass. That means that it takes energy to get them moving, a lot of energy to get them moving fast, and infinite energy to reach the speed of light. They can travel at very high speeds, but they can never achieve light speed.
That means that you, and the molecules and particles that make up who you are right now, would never actually be able to teleport. Not instantaneously, and not at the speed of light. Transporting your body somewhere that quickly is never going to happen. It’s just not possible to move all the particles in your body fast enough.
But does that mean teleportation is impossible? Not quite!
There is one way it can still happen, and that’s if we relax what “you” means. What if we didn’t transport you, your molecules or your particles? What if we just transmitted the idea of you?
You Are Information
One possible way to achieve speed-of-light teleportation is to scan you and send you as a beam of photons. Photons don’t have any mass, which means they can go as fast as the universe will allow. In fact, photons can only travel at the speed of light (there’s no such thing as a slow-moving photon).*
Here’s a basic recipe for speed-of-light teleportation:
Step #1: Scan your body and record where all your molecules and particles are.
Step #2: Transmit this information to your destination via a beam of photons.
Step #3: Receive this information and rebuild your body using new particles.
Is this possible? Humans have made incredible progress in both scanning and 3D printing technologies. These days, magnetic resonance imaging (MRI) can scan your body down to a resolution of 0.1 millimeters, which is about the size of a brain cell. And scientists have used 3D printers to print increasingly more complicated clusters of living cells (known as “organoids”) for testing cancer drugs. We’ve even made machines (using scanning tunneling microscopes) that can grab and move individual atoms. So it’s not hard to imagine that one day we might be able to scan and then print whole bodies.
The real limitation, though, might not be technological but philosophical. After all, if someone made a copy of you, would it actually be you?
Remember, there’s nothing particularly special about the particles that make up your body right now. All particles of a given type are the same. Every electron is perfectly identical to every other electron, and the same is true for quarks. Particles don’t come out of the universe factory with personalities or any sort of distinguishing features. The only difference between any two electrons or any two quarks is where each of them is and what other particles they’re hanging out with.*
But how much would a copy of you still be you? Well, it depends on two things. The first is the resolution of the technology that scans and prints you. Can it read and print your cells? Your molecules? Your atoms, or even your individual particles?
The even bigger question is how much your “you-ness” depends on the tiny details. What level of detail does it take for the copy to still be considered you? It turns out that this is an open question, and the answer might depend on how quantum your sense of self is.
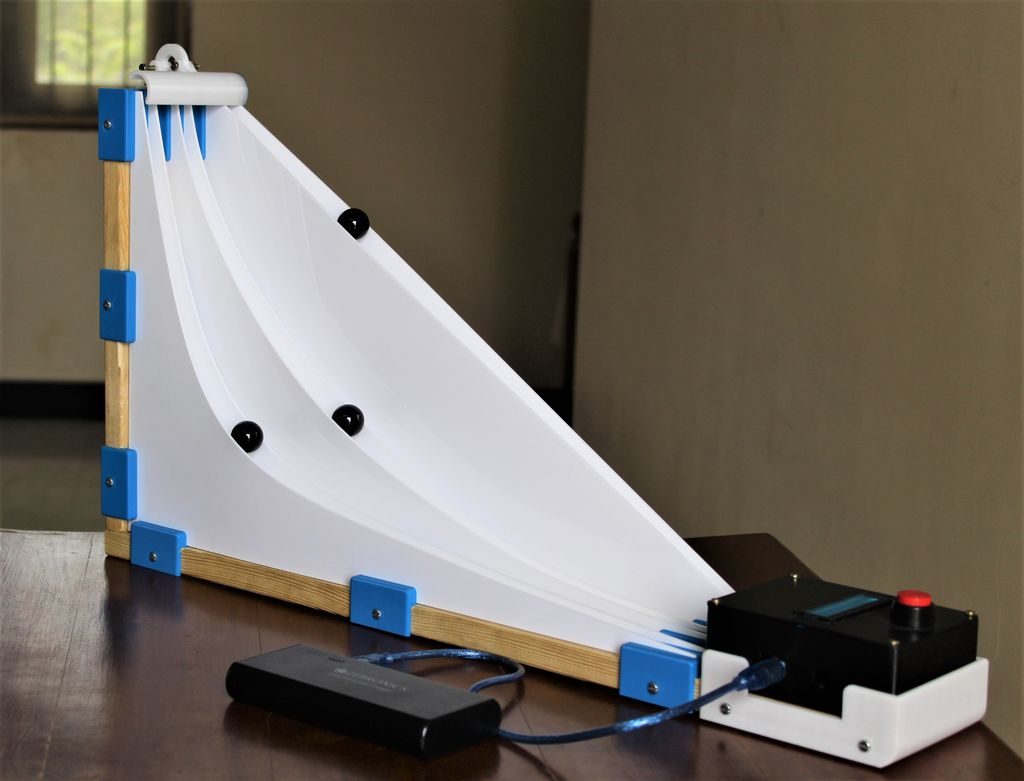
As described in this project’s write-up, “The brachistochrone curve is a classic physics problem, that derives the fastest path between two points A and B which are at different elevations.” In other words, if you have a ramp leading down to another point, what’s the quickest route?
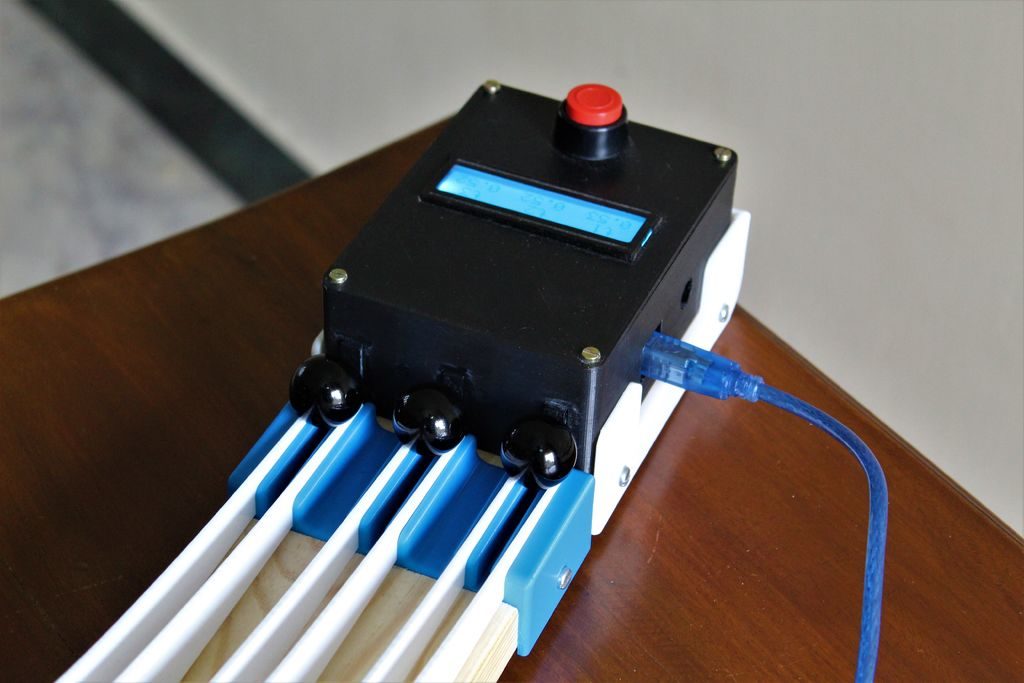
Intuitively—and incorrectly—you might think this is a straight line, and while you could work out the solution mathematically, this rig releases three marbles at a time, letting them cruise down to the Arduino Uno-based timing mechanism to see which path is fastest.
The ramps are made out of laser-cut acrylic, and the marbles each strike a microswitch to indicate they’ve finished the race. The build looks like a great way to cement a classic physics problem in students’ minds, and learn even more while constructing the contraption!
That’s a lot to unpack, but suffice it to say, all this stems from [Tom]’s obvious appreciation for physics. Where most of us would be satisfied with tossing a ball into the air and estimating the height to solve the classic kinematic equations from Physics 101, [Tom] decided that more extreme means were needed.
Having a compound trebuchet close at hand, a few simple mods were all it took to launch projectiles more or less straight up. The first payload was to be rocket-shaped, but that proved difficult to launch. So [Tom] 3D-printed an upsized golf ball and packed it with electronics to record the details of its brief ballistic flight. Aside from an altimeter, there’s a small servo controlled by an Arduino and an accelerometer. The servo retracts a pin holding the two halves of the ball together, allowing a parachute to deploy and return the package safely to Earth. The video below shows some pretty exciting launches, the best of which reached over 60 meters high.
Subatomic physics is pretty neat stuff, but not generally considered within the reach of the home-gamer. With cavernous labs filled with racks of expensive gears and miles-wide accelerators, playing with the subatomic menagerie has been firmly in the hands of the pros for pretty much as long as the field has been in existence. But that could change with this sub-$100 DIY muon detector.
[Spencer Axani] has been fiddling with the idea of a tiny muon detector since his undergrad days. Now as an MIT doctoral candidate, he’s making that dream a reality. Muons are particles that are similar to electrons but more massive and less likely to be affected by electromagnetic fields. Muons rain down on the Earth’s surface at the rate of 10,000 per square meter every minute after being created by cosmic rays interacting with the atmosphere and are capable of penetrating deep into the planet. [Spencer]’s detector is purposely kept as low-budget as possible, using cheap plastic scintillators and solid-state photomultipliers hooked up to an Arduino. The whole project is as much STEM outreach as it is a serious scientific effort; the online paper (PDF link) stresses the mechanical and electronics skills needed to complete the build. At the $100 price point, this build is well within the means of most high school STEM programs and allows for a large, distributed array of muon detectors that has the potential for some exciting science.
My son presented the Arduino Data Logger he wrote for my circuits class to the Global Physics Department on 2013 May 15. The sessions are recorded, and the recording is available on the web (though you have to run Blackboard Collaborate through Java Web Start to play the recording).
I thought he did a pretty good job of presenting the features of the data logger.
He’s down to only three classes now (US History, Physics, and Dinosaur Prom Improv), though he still has homework to catch up on in Dramatic Literature and his English class. He’s still TAing for the Python class also.
On Thursday and Friday this week, he’ll be taking the AP Computer Science test and the AP Physics C: Electricity and Magnetism test. He’s having to take both tests in the “make-up” time slot, because we couldn’t get any local high school to agree to proctor the tests for him during the regular testing time. Eventually his consultant teacher convinced the AP coordinator to let her proctor the tests, but by then it was too late to register for anything but the makeup tests. We’re way behind schedule on the physics class, so he’s just going to read the rest of the physics book without working any problems before Friday’s exam—we’ll finish the book in a more leisurely fashion after the exam. He won’t be as prepared for the physics exam as I had hoped, but at least the CS exam looks pretty easy to him.
One thing I didn’t realize is that schools can charge homeschoolers whatever the market will bear for proctoring the tests:
Depending on the reasons for late testing, schools may be charged an additional fee ($40 per exam), part or all of which the school may ask students to pay. Students eligible for the College Board fee reduction will not be charged the $40-per-exam late-testing fee, regardless of their reason for testing late.
Schools administering exams to homeschooled students or students from other schools may negotiate a higher fee to recover the additional proctoring and administration costs.
We’re paying $145 per exam (not just the $89 standard fee and the $40 late fee), but I’m glad he gets to take the exams at all this year.
Tomorrow he and I are doing another campus tour—this time at Stanford. He managed to get an appointment with a faculty member, but we noticed that the faculty member is scheduled to be teaching a class at the time of the appointment—I wonder what is going to happen with that. I’ll report on the visit later this week.
My son presented the Arduino Data Logger he wrote for my circuits class to the Global Physics Department on 2013 May 15. The sessions are recorded, and the recording is available on the web (though you have to run Blackboard Collaborate through Java Web Start to play the recording).
I thought he did a pretty good job of presenting the features of the data logger.
He’s down to only three classes now (US History, Physics, and Dinosaur Prom Improv), though he still has homework to catch up on in Dramatic Literature and his English class. He’s still TAing for the Python class also.
On Thursday and Friday this week, he’ll be taking the AP Computer Science test and the AP Physics C: Electricity and Magnetism test. He’s having to take both tests in the “make-up” time slot, because we couldn’t get any local high school to agree to proctor the tests for him during the regular testing time. Eventually his consultant teacher convinced the AP coordinator to let her proctor the tests, but by then it was too late to register for anything but the makeup tests. We’re way behind schedule on the physics class, so he’s just going to read the rest of the physics book without working any problems before Friday’s exam—we’ll finish the book in a more leisurely fashion after the exam. He won’t be as prepared for the physics exam as I had hoped, but at least the CS exam looks pretty easy to him.
One thing I didn’t realize is that schools can charge homeschoolers whatever the market will bear for proctoring the tests:
Depending on the reasons for late testing, schools may be charged an additional fee ($40 per exam), part or all of which the school may ask students to pay. Students eligible for the College Board fee reduction will not be charged the $40-per-exam late-testing fee, regardless of their reason for testing late.
Schools administering exams to homeschooled students or students from other schools may negotiate a higher fee to recover the additional proctoring and administration costs.
We’re paying $145 per exam (not just the $89 standard fee and the $40 late fee), but I’m glad he gets to take the exams at all this year.
Tomorrow he and I are doing another campus tour—this time at Stanford. He managed to get an appointment with a faculty member, but we noticed that the faculty member is scheduled to be teaching a class at the time of the appointment—I wonder what is going to happen with that. I’ll report on the visit later this week.
The Santa Cruz Robotics Club met again today, for the first time in over a month. The current project is not the underwater ROV (we’re all getting very tired of waterproofing problems), but an automated Nerf gun.
The club members came up with some very ambitious plans for the Nerf gun (which included getting a Raspberry Pi and doing image processing to have a self-aiming gun), but I’m making them build quick-and-easy prototypes to try out their ideas one step at a time. I don’t think I can get an Raspberry Pi this summer—the companies doing the distribution aren’t taking more orders (just expressions of interest) and they don’t expect to clear the current backlog until September at the soonest. They are doing batches of 100,000 units, and that doesn’t seem to be enough to shrink the lead time—if anything, the lead time is growing.
So, giving up on image processing for this summer, there are still a lot of things to build. For today’s four-hour meeting (which included a 1-hour trip to the hardware store and a fifteen-minute snack break), the goal was simply to test out the basic launcher concept: an air reservoir pressurized by a bike pump, a solenoid valve, and a barrel.
The first prototype. The air reservoir is about 18″ of 1-½” PVC pipe on the left, and the barrel is about 24″ of ½” PVC pipe on the right.
The biggest problem was that the valve has ¾” male pipe threads, but we wanted 1-½” PVC pipe for the reservoir (because we had a piece handy—we may build a bigger reservoir later) and ½” PVC pipe for the barrel (because Nerf darts just fit inside—probably Nerf guns were prototyped with PVC barrels). Our hardware store run was to get threaded adapters to make things fit.We wanted everything to be joined with screw threads, so that we could disassemble the components and replace them or add elbows as needed.
Note that the ½” PVC pipe is also a good size for compressed-air paper “rockets”. The term “rocket” is a misnomer here, as all the acceleration occurs while the rocket is on the launcher—it is modeled more like a gun than like a rocket. (But my soda-bottle rocket simulator can model these paper bullets also.) It would probably best to have a shorter barrel for doing rocket launching—just the length of the rocket and no more, since the longer barrel results in more pressure loss with no gain in launch speed.
The bicycle valve glued into a ½” female-threaded end cap was one I’ve had for a long time, as part of a soda-bottle rocket launcher. I had two of them, and both failed in testing today (the Barge cement holding the valve stem in failed—we’ve now reglued them with a different cement), though we managed some testing before the failure.
The solenoid valve we used was the same model (sold by Sparkfun) as the one used for the vacuum bottle on the ROV. It has ¾” male pipe threads on each side. To make it air-tight we had to disassemble it and grease the rubber membrane thoroughly with vaseline or faucet grease, but we had done that months ago, so it did not need to be done today. The valve only works in one direction, but the high-pressure side is clearly marked by a metal intake screen, so assembling it the right way around is easy.
I was not sure that the solenoid valve would work in this application. It is not the model of valve that the compressed-air “rocket” people have used—those valves cost about twice as much and have female threaded ends rather than male threaded ends. I think that the mechanism they use may open up a bigger channel for air or water than the cheap solenoid valve sold by Sparkfun.
My first concern was that I did not know whether the valve would open up wide enough and fast enough to let a blast of air through to get a clean launch. Second, I did not know whether we could open and close the valve fast enough to retain pressure in the reservoir for doing multiple shots.
We controlled the solenoid valve with an Arduino and the Hexmotor motor-control board (which is really overkill for one solenoid—a single power transistor would be enough to interface the Arduino to a solenoid, but I did not have one handy). My son wrote an Arduino program to allow us to experiment with the duration of the solenoid pulse. If it were too short, the Nerf dart would not leave the barrel. If it were too long, air pressure would be wasted. He allowed for 100 µsec increments in pulse duration, under control from commands on the USB serial line.
Because the glue they used takes 24 hours to set properly, we only tested at low pressure today (20–30 psi). At those pressures, a 16 msec pulse was not long enough for the dart to clear the barrel, but a 19.2 msec pulse was easily long enough. We were also able to launch a 14g paper “rocket” left over from Maker Faire, though it did not go as high as the approximately 1.6g “Nerf” darts (I think several of the foam darts we have a different brand). We would not have expected it to go as high, since it was only accelerated for its 11″ length, not the 24″ length of the barrel for the darts, and it weighed a lot more.
One thing I thought about was monitoring the air pressure in the reservoir electronically. I doubt that we’ll put a pressure sensor in the reservoir, though, as the sensors I have only go up to 250 kPa absolute (about 21 psi above atmospheric pressure—about as low as we could fire with). Freescale makes a 145psi (1000 kPa) sensor, the MPX5999D, but it is a differential sensor without port tubes (so would be difficult to mount) and it costs $13.
Perhaps the other thing worth doing today is to analyze how fast the Nerf dart should be going as it leaves the barrel, and how high it should fly if we shoot it straight up. The physics here is fairly simple, if we assume that opening the solenoid valves connects us to a constant-pressure source. (In practice, we saw about a 10psi or 70kPa drop in pressure after one shot. If the pressure is P, then the force on the dart is P*area. The cross-sectional area of the foam dart is a little hard to measure, because of the squishiness of the foam, but the inside diameter of the barrel is 1.45cm, for a cross-sectional area of 1.65 cm^2. At 140 kPa (about 20 psi), the force on the dart would be 23 Newtons. That force is applied for about 60 cm (the length of the barrel), for a total energy of about 14 Joules.
We can use the kinetic energy of the dart to get its speed (E = ½ m v2), so for 140 kPa, the dart should leave the barrel at about 130 m/s or 290 mph. I suspect that we are not getting anywhere near that speed, for several reasons, including leakage of air around the dart, limited speed of air moving through the valve, and friction of the dart in the barrel (mainly from the pressure wave in front of it, but also from rubbing on the sides of the barrel).
We can also use the kinetic energy of the dart to estimate how high it would fly (ignoring air resistance, which is obviously hugely important for a low density object like a foam dart). The potential energy of a mass at height h is , so the height it would go without air resistance is . For 14 Joules and 1.6 grams, that would be almost 900m. I think that 20m is a more reasonable estimate for the height the dart went, though I never could see it near the top of its trajectory.
I tried adding the specs for the Nerf dart and a 60cm barrel to my rocket simulator (to get a crude estimate of the effect of air drag), and for 140 kPa I got an estimated max speed of 132m/s and an estimated max height of 52.6m. I don’t know if that height is reasonable—certainly it is better than the no-air-resistance estimate. The 6.78 second estimated time of flight seems to be fairly reasonable, though we never timed it.
Doubling the pressure increases the maximum velocity by a factor of 1.414, but only increases the maximum height to 60.8 m, a 16% increase. Doubling the barrel length has about the same effect. Air drag is what determines the speed of the dart, and that is the least well-modeled part of my simulation.
On Thursday, when they club meets again, they’ll try experimenting with higher pressures, and see whether 17 or 18 msec pulses are long enough—the shorter the pulse the less air will be wasted, and the more shots they can make from the reservoir. It may be necessary to design a bigger reservoir or add a compressor to the design, since they eventually want a fully automatic Nerf gun, not the one-shot muzzle-loader that they made as the prototype today. They’ll also start designing a pan-tilt mechanism for the Nerf gun, probably prototyping it out of Lego Technic components.















 , so the height it would go without air resistance is
, so the height it would go without air resistance is  . For 14 Joules and 1.6 grams, that would be almost 900m. I think that 20m is a more reasonable estimate for the height the dart went, though I never could see it near the top of its trajectory.
. For 14 Joules and 1.6 grams, that would be almost 900m. I think that 20m is a more reasonable estimate for the height the dart went, though I never could see it near the top of its trajectory.






