Scared for a Drink?
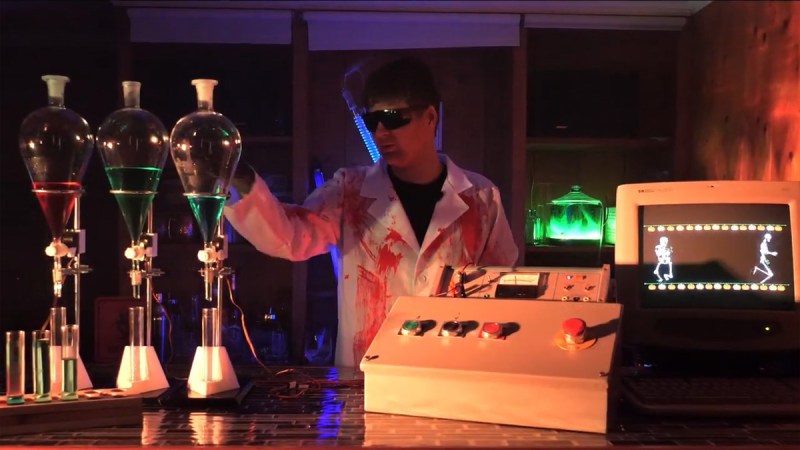
Halloween is about tricks and treats, but who wouldn’t fancy a bit to drink with that? [John Sutley] decided to complete his Halloween party with a drink dispenser looking as though it was dumped by a backstreet laboratory. It’s not only an impressive looking separating funnel, it even runs on an Arduino. The setup combines lab glassware, servo motors, and an industrial control panel straight from a process plant.
The power management appeared the most challenging part. The three servos drew more current than one Arduino could handle. [John] overcame voltage sag, brownouts, and ghostly resets. A healthy 1000 µF capacitor across the 5-volt rail fixed it. With a bit of PWM control and some C++, [John] managed to finish up his interactive bar system where guests could seal their own doom by pressing simple buttons.
This combines the thrill of Halloween with ‘the ghost in the machine’. Going past the question whether you should ever drink from a test tube – what color would you pick? Lingonberry juice or aqua regia, who could tell? From this video, we wouldn’t trust the bartender on it – but build it yourself and see what it brings you!

 probed per run, but however it works it produces some interesting, almost random results. The premise is that the point-to-point surface resistivity is unpredictable due to the chaotically formed crystals all jumbled up, but somehow uses these measured data to generate some waveshapes vaguely reminiscent of the resistivity profile of the sample, the output of which is then fed into a sound synthesis application and pumped out of a speaker. It certainly looks fun.
probed per run, but however it works it produces some interesting, almost random results. The premise is that the point-to-point surface resistivity is unpredictable due to the chaotically formed crystals all jumbled up, but somehow uses these measured data to generate some waveshapes vaguely reminiscent of the resistivity profile of the sample, the output of which is then fed into a sound synthesis application and pumped out of a speaker. It certainly looks fun.