May the 4th be with you is almost upon us, so get ready for an influx of Stars Wars paraphernalia. That includes new merch, such as Casetify's collaboration with Star Wars. Yes, starting today, Star Wars fans can get a series of branded accessories for devices ranging from iPhones to wireless chargers.
One of the most over-the-top items available is a Darth Vader AirPods holder. As you can see above, it's an entire stand for your AirPods that almost looks like a little bobblehead doll. But, it fits your AirPod case (which can also be Star Wars themed) and leaves space for the keychain to poke out. Plus, Casetify claims it's "complete with authentic breathing sound effects" — a purchase that truly falls under the category of something you never knew you needed.
The Darth Vader head follows similar Casetify products, including a stand that looks like RX-78-2 from Gundam. It also held both AirPods and another case from the anime collaboration. A separate roll out with Neon Genesis Evangelion included an AirPods case based on the head of Evangelion Unit-01.
As for the Star Wars collection, you can check out all the products below and purchase items starting at $32. Some of the themed accessories will be available to buy in bundles.
Casetify
This article originally appeared on Engadget at https://www.engadget.com/audio/headphones/casetifys-latest-airpods-case-is-a-darth-vader-head-080012607.html?src=rss
Hacking childhood toys is somewhat of a maker’s rite of passage around here. John Park over at Adafruit has made a habit of it for many years though. His latest, he shows how to transplant the brain of a See-N-Say to have your own custom messages. This update really modernizes things. Instead of a plastic […]
What kid hasn't wished that their toy car was a full-sized road-going vehicle? Mattel showed some serious commitment to that idea by unveiling a full-sized EV version of the Barbie Extra Car based on the Fiat 500e that looks exactly like the toy car, Roadshow has reported.
Now showing at the LA Auto Show, the Extra Car is sitting on a Fiat 500e chassis, with an all-electric powertrain offering 100 miles of range and a healthy 147 pound-feet of torque — enough to let a human-sized Barbie Extra and her pets, accessories, etc. zoom around town. At the same time, Mattel used CAD files to duplicate the body of the toy car precisely and scale it up in foam to fit on the Fiat undercarriage.
Some of those details include sparkly silver paint and wing-shaped doors. The 20- and 22-inch (front/rear) pink and rainbow-hued wheels were apparently 3D-printed and hand painted. The headlights are gold and star shaped, which, nice touch. Sure, the whole affair is designed to promote Mattel's lineup of Barbie Extra dolls and accessories, but it should make the auto show a bit more accessible for kids.
It may have been another long year, but the holidays are finally approaching — and, with supply chain issues plaguing retail, it’s best to get your shopping done sooner rather than later. This year we’re all a little burnt out on screens, so the best gifts for kids are things they can hold. But, since this is Engadget, we’re always looking for that tech angle. This year’s crop of tech toys for kids is mostly grounded in the real world, with a few electronic twists to surprise and delight.
Miles Morales in Winter Suit Funko Pop
Will Lipman Photography for Engadget / Funko
It’s always good to grab a few stocking stuffers, and Funko makes figures from what feels like every pop culture property on earth. Around here we’re partial to the video game ones, of course, and what’s more festive than this adorable Spider-Man all dressed up for the cold weather? It’ll look great while also adding a bit of geeky holiday cheer to someone’s bookshelf or desk.
For kids who aren’t old enough to build their own lightsaber at Disney’s Galaxy Edge, this kit from Hasbro might be the next best thing. Not only is it way more affordable, but it’s also quite durable, allowing kids and adults alike to reenact their favorite Jedi versus Sith battles with gusto. Best of all, a child can rebuild their lightsaber again and again using different parts, so they can have a customized weapon that fits their mood each day.
Maybe taking care of a small creature was just too stressful for your kid, and you’ve had to console them many a time when the little ghost floating above a tombstone appears. Well, now Tamagotchi has a special astromech droid they can take care of instead, one they have to clean and play a variety of mini-games with. If they don’t take care of little R2, the Jawas will take him away which might still be a bummer but hey, maybe they’ll sell him off to a local moisture farmer with a thirst for adventure.
Will Lipman Photography for Engadget / Spin Master
Kids are cute, but also weird and quirky, so why not get the child in your life something that reflects the more wild side of their personality? Purse Pets are basically living bags that can hold stuff but also blink, purr and even blow kisses at a child when it’s happy. It’s a real eye-catching accessory, one that will have them feeling like they’re on the runway — especially when you activate the Purse Pet’s runway music.
Barbie first went to space way back in 1965 and, while she’s had plenty of spacesuits over the decades, none have been as realistic as this one. That’s because this one is based on real-life space explorer Samantha Cristoforetti, an Italian astronaut who was once the record holder for the longest space flight by a woman. Your kids can reenact her various scientific experiments in space with the doll, then cheer on the real-life Cristoforetti next year as she commands ISS Expedition 68.
It feels like an unwritten rule that every child has to have one of those wooden train and track sets. Why not spice things up a bit by adding in this tech-enabled station that signals the included train to stop and flash its lights, just like the real thing. If your kid is a railfan you can even use the free Smart Tech Sound app to change the sounds to those from famous systems like London, Paris or Berlin.
We were all super jealous of Harry Potter when Hagrid presented him with a lovely snowy owl who would become his mail carrier and friend. However, in real life owls can be pretty messy and aren’t as affectionate. So why not get your loved ones this interactive, life-sized replica instead? She loves to be petted and while she can’t fly, she can safeguard letters for you, only releasing them to people who have the secret code.
The Got2Glow Fairy Finder may look like a slightly fancier mason jar, but it has a special electronic twist. When you open the lid, a fairy will “fly” inside and show up on the front screen. What kind of fairy? It depends on how a child holds the jar and how bright the room is. There are 100 different magical creatures to collect and trade with their friends, so it should keep your kids active and busy for a while.
Your child may not be old enough to drive a real car, but chances are they’ve taken a few spins around Rainbow Road in Nintendo’s Mario Kart video games. And even if they haven’t, they’ll still enjoy playing with the whimsical vehicles from the series, recreated in 1/64-scale so they can fit in the palm of a kid’s hand. All the favorites are here, from Mario to Yoshi and even the often-forgotten Waluigi. Some of the karts even include gliders so kids can simulate some of the more treacherous jumps like Peach’s Castle.
We’ve been a big fan of the Mario LEGO sets since their launch, but now it’s time for his brother to have a little time in the sun. It’s just like having a Super Mario game you can physically build and hold in your hand, complete with platforms, a see-saw and blocks. Luigi will even react to the course thanks to a small LCD screen embedded in his chest, and he’s fully compatible with the other sets so you can build a whole world for him to explore.
You can still call it the Slave I if you want, but the most important thing about this Firespray-31-class spacecraft is who it belongs to: the most feared bounty hunter in the galaxy, Boba Fett. He even has his own show coming out at the end of December. We know that’s a long time to wait, but your family can at least spend part of that time putting together this 593-piece kit that even includes a tiny minifig Boba and Din Djarin from the Mandalorian.
There are toys that laugh, eat, burp and even poop, but there aren’t a lot that give birth. That’s probably because it’s pretty weird, but Spin Master’s Peek-a-Roo also makes it pretty adorable. This plush panda will react to being petted and spoken to by a child and, if the toy is treated well, it produces a tiny baby from the pouch in its stomach. The baby toy will continue to live there once born, popping up whenever its mama is happy.
Advent calendars are a great way to get your kid excited for the holidays, but sometimes the little gifts inside aren’t so great. Why not go full-on nerdy with this Star Wars calendar, which has a smattering of tiny sets your kid has to build alongside minifigs of characters like Rey, Luke Skywalker and a holiday-themed Poe Dameron? The kits will hopefully keep them busy so they’re not asking you how many days are left until the big gift-giving occasion.
Kids love cameras but, with everything digital these days, there’s a little less tactility, which kids also love. Printcams tend to be too expensive for many adults, never mind children, which makes them a no-go — until now. The VTech KidiZoom prints photos for as little as a penny, so it’s not a big financial deal when your child takes 100 photos of their feet. Just make sure you keep them stocked up with fresh paper.
It’s tempting to get your kid every shiny new toy they ask for. But some toys are better than others when it comes to actually stimulating your child’s brain while also keeping them entertained. The parents on the Engadget staff know this well, and we’ve tried out a bunch of educational toys with our kids, with various results. These are some of the ones that have had staying power with our children — and even we adults have to admit we found them pretty fun, too.
Smart Lab: Smart Circuits
Will Lipman Photography for Engadget
When it comes to introducing kids to electronics there are a ton of options, but I personally like the Smart Circuits kit. It can take a kid from simple blinking lights to complex motion-controlled games. The snap-together baseboard can lie flat on a table like a regular breadboard, but it can also be folded into a cube or the pieces can be attached at a 90-degree angle. This gives kids an extra element to play with when they graduate to designing their own circuits.
The kit itself only has a few pieces, but they’re quite flexible. And they’re all housed in large colorful plastic that should be easy for a kid to handle. There’s the usual electronics kid fare, like LEDs, a speaker, a potentiometer and two buttons. But there’s also a tilt switch, a light sensor and a microprocessor capable of handling some relatively robust tasks. The kit comes with instructions for 50 projects, but with the parts available a creative child could build quite a few more.
My one critique is that the jumper wires can be tough to insert and might require a bit of patience — something we know not every eight-year-old has an abundance of.— Terrence O’Brien, Managing Editor
A shape sorter is an awesome toy for younger kids because it encourages hand-eye coordination, fine motor skills, problem-solving and even vocabulary (by identifying the names of shapes and colors). My kids have a few of them, but the one I like most is this Playskool model and here’s why. The lid latches, which means they can’t just dump the shapes out easily; they have to learn how to work the mechanics of the lid as well. Also, the multi-colored shapes have tactile patterns on them that match the area of the box they’re supposed to fit into, and that gives me another teaching opportunity. The whole thing is durable, too — my son likes to chew on the shapes and my daughter likes to stand on the box, but despite that abuse, there’s not so much as a dent or a scratch on it. And because it’s only $9, it makes a great gift if you’re buying for someone else’s kiddo. — Amber Bouman, Associate Editor, Parenting
The Yoto Player is the perfect toy for a young child who wants to play their own tunes and stories, but who isn’t ready for an iPad or smart speaker of their own. Yoto’s cute design and blocky, pixel-like display looks distinctly retro. It’s detailed enough for kids to make out images, but it’s insufficient for video, which should actually be good news for parents worried about too much screen time. Yoto calls the player a “carefully connected” speaker: You bring it online during the initial setup, but from there kids can access safe songs and other content through physical cards. — Devindra Hardawar, Senior Editor
While Amazon’s Fire tablets may not always be the best option for adults, the company’s kid-friendly models are a safe bet. Thanks to the included case, the Fire Kids Pro lineup is built to withstand frequent tumbles. The company offers adequate parental controls so you can keep tabs on content and includes one year of Amazon Kids+ for free. The Kids+ service offers access to over 20,000 apps, games, books, videos, songs and audiobooks from National Geographic, LEGO and more. You also get access to a digital store where you can install additional apps as you see fit. — Billy Steele, Senior News Editor
I am, admittedly, a sucker for a good subscription box. But Kiwi Crate is the only one that doesn’t feel like an indulgence. Each month my three-year-old gets a collection of simple DIY toys, crafts and games built around a theme. For instance, a recent box was all about bioluminescent animals. Inside was a plush lightning bug that we had to stuff ourselves and shape using hair ties; a mushroom that had us painting a Slurpee lid and then dotting it with glow-in-the-dark stickers; and a dancing, glowing jellyfish as well as several window clings of sea creates for him to create scenes with.
Past kits have covered farm life, dinosaurs and simple machines like ramps. The stuff inside the box is usually pretty simple (think: cardboard, felt and wood). It’s definitely not built to last, but my kid has gotten plenty of use out of each piece.
The best part is the crates will grow with him. As he gets older the projects will get more complex (and the price will go up). Later boxes include everything from screen-printing tools, to trebuchet kits and even robots. — T.O.
Sorry, folks, but this isn’t an electronic gizmo-toy that you can plug in, connect to the internet and treat it as somehow educational. As something of a traditionalist, I’ve always preferred solid toys that offer kids some license to imagine what’s going on, and this offers that in spades. Duplo’s My First Number Train is a train, with the coaches made from double-height number blocks running from 0 - 9. The aim is for your rugrats to place each block in chronological order and get familiar (almost subconsciously) with the concept of a number line.
Then, as they get a little older, you can do any number of things with the set, including (as we did) tie a ribbon around the chimney and fashion it as a pull-along train. Both my son and daughter (we bought one for each) love racing through the hallway with their pull-along trains. And, now that my daughter is in school, the train’s number blocks come in handy to help with the basics of her maths homework. Plus, it never hurts to have a surplus of double-height Duplo bricks for all of the (completely inaccurate) Frozen castles you’ll be building on Saturday mornings. — Daniel Cooper, Senior Editor
The Kano PC may look at first like a cheap Surface knock-off, but based on our testing, it’s also a perfect introduction to the computer world for young children. It’s partially DIY — the base unit is a Windows 10 tablet with a pre-installed CPU, memory and storage, but kids will have to plug in a colorful battery and speaker module to get it going. Kano encourages youngsters to take a close look at all of the PC’s clearly labeled hardware with the bundled magnifying glass. And once they get going, it’s still a decently capable Windows 10 PC, with a Celeron CPU, 4GB of RAM and a 1080p webcam. Heck, it even comes with a keyboard cover, something Microsoft still hasn’t bundled with the Surface tablets. — D.H.
The Blipblox may look like a simple noise-maker for kids, but this gadget is much more than just a toy. While the device is loaded with 300 melodies and a synchronized light show, it also packs a capable digital synthesizer engine. There’s an oscillator with the usual assortment of synth parameters along with an amp envelope, two LFOs, modulation envelope and a low-pass filter. The Blipblox also has a MIDI input for use with a keyboard or other accessories in addition to a ¼-inch output. Lastly, it runs on three AA batteries or plugged in via a USB cable. Blipblox can teach kids about music through a basic approach to instruments and synthesis, but its features are advanced enough to offer noise-making magic for parents, too. — B.S.
My kids are currently fascinated with snaps, zippers and closures, which is fun because it means it’s easy to amuse them, but awkward, too, because they often decide to undo the closures on the shirt I’m wearing. A busy board capitalizes on this curiosity by offering several different clasps, snaps, zippers, buttons and openings for little ones to work their fingers on. It intrigues children by activating their senses and helps them develop their fine-motor skills and problem solving by using real-world obstacles. It also adheres to the Montessori philosophy of simple, wooden toys that help children explore the world around them through play. The deMoca busy board is one of my favorites because it has bright, eye-catching colors, and 10 sensory activities including a zipper, a buckle, a latch and Velcro. It’s easy to bring along on trips, and deMoca also makes a “Quiet Book” — a soft-cover, fabric version that’s washable. — A.B.
One of the goodies from the Hackaday Superconference was an Adafruit HalloWing. And I thought: surely a Jolly Wrencher case must be made for this skull-shaped circuit board! How has no one made of these yet? So I remixed an existing clip-on case that fits the included battery (Thanks DoctorWhich!), added the Jolly Wrenches and [...]
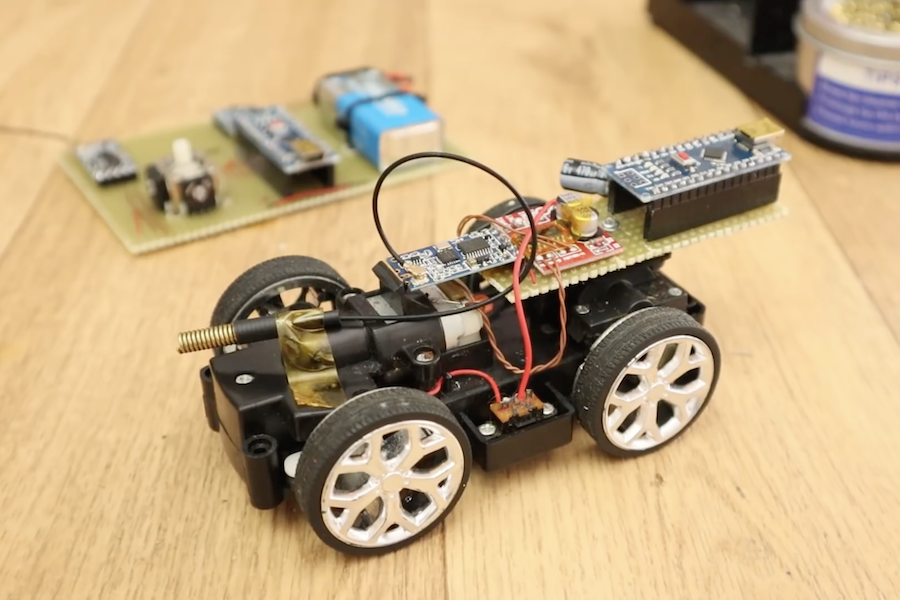
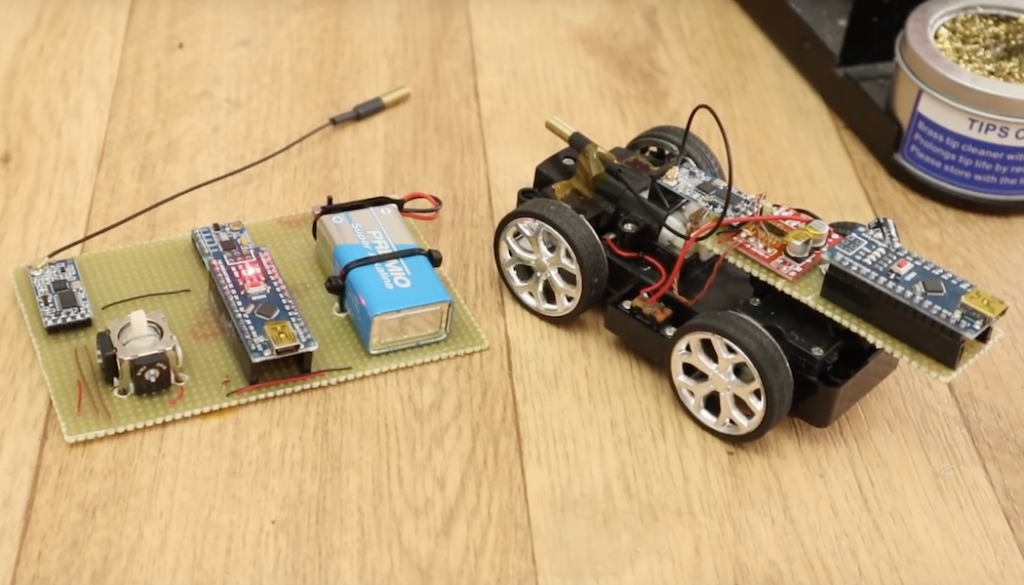
When piloting a vehicle remotely, it’s only natural to tilt your controller one way or the other to “help” guide it in the right direction. While usually this has no effect whatsoever, YouTuber Electronoobs decided to take this concept and run with it, creating a remote control transmitter that responds to an onboard MPU-6050 inertial measurement unit.
The transmitter’s Arduino Nano takes movement data, and sends the corresponding signals to a custom receiver board on the RC car via a pair of HC-12 wireless modules. A second Arduino mounted in the car then commands the vehicle’s DC motors with the help of an H-bridge.
This is a radio controller that has 2 analog channels and the data is out from a MPU-6050 gyro module. So, we could control a toy car for example just by rotating the controller. I usually use the nRF24 module, but in this project I also want to show you how to use the HC-12 module. You will learn how to get the IMU data, how to use the HC-12 radio connection and how to control 2 DC motors using PWM signals and an H-bridge.
It’s quite a versatile build, and it can even be set up to output PWM signals if you need to interface with more advanced electronics.