Little Quadruped Uses Many Servos
Walking robots were once the purview of major corporations spending huge dollars on research programs. Now, they’re something you can experiment with at home. [Technovation] has been doing just that with his micro quadruped build.
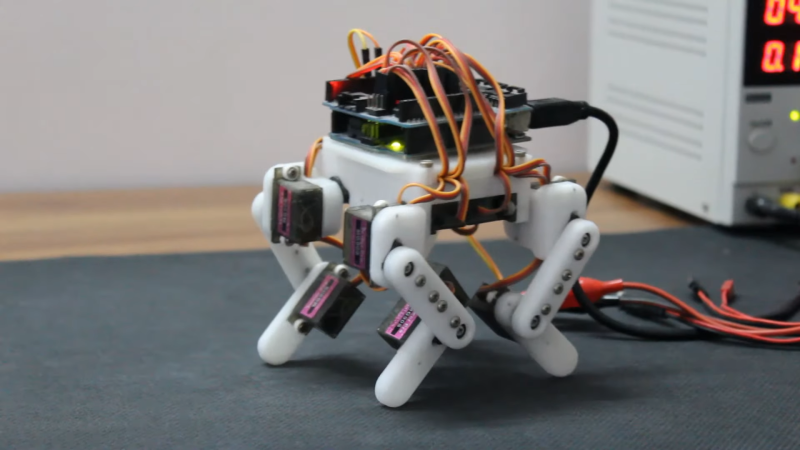
The build runs twelve servos – three per leg – to enable for a great range of movement for each limb. The servos are all controlled by an Arduino Uno fitted with an Arduino Sensor Shield. Everything is fitted together with a 3D printed chassis and limb segments that bolt directly on to the servo output shafts. This is a common way of building quick, easy, lightweight assemblies with servos, and it works great here. Inverse kinematics is used to calculate the required motions of each joint, and the robot can take steps from 1 to 4cm long in a variety of gaits.
We’d love to see a few sensors and a battery pack added on to allow the ‘bot to explore further in an untethered fashion. [Technovation] has left some provision to mount extra hardware, so we look forward to seeing what comes next.
We’ve seen bigger quadrupeds do great things, too. Video after the break.