A worked example of a Back-propagation training cycle.
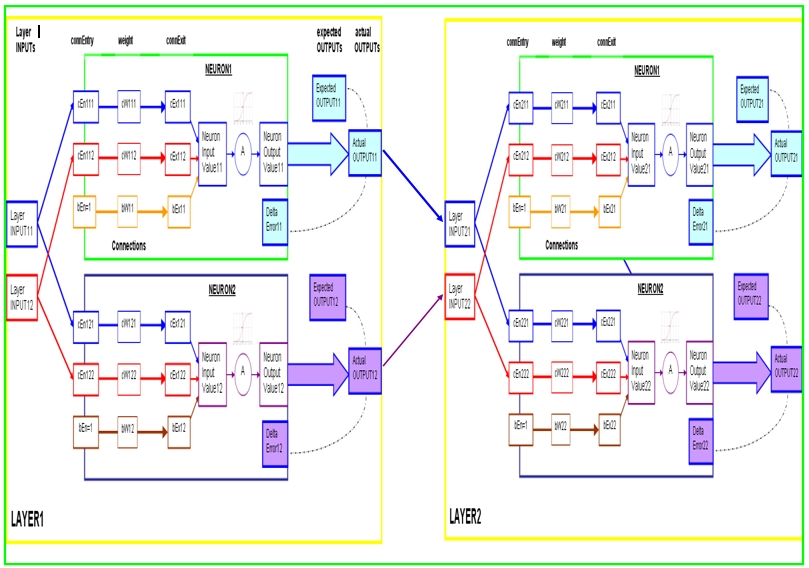
In this example we will create a 2 layer network (as seen above), to accept 2 readings, and produce 2 outputs. The readings are (0,1) and the expectedOutputs in this example are (1,0).
Step 1: Create the network
NeuralNetwork NN = new NeuralNetwork();
NN.addLayer(2,2);
NN.addLayer(2,2);
float[] readings = {0,1};
float[] expectedOutputs = {1,0};
NN.trainNetwork(readings,expectedOutputs);
This neural network will have randomised weights and biases when created.
Let us assume that the network generates the following random variables:
LAYER1.Neuron1
Layer1.Neuron1.Connection1.weight = cW111 = 0.3
Layer1.Neuron1.Connection2.weight = cW112 = 0.8
Layer1.Neuron1.Bias = bW11 = 0.5
LAYER1.Neuron2
Layer1.Neuron2.Connection1.weight = cW121 = 0.1
Layer1.Neuron2.Connection2.weight = cW122 = 0.1
Layer1.Neuron2.Bias = bW12 = 0.2
LAYER2.Neuron1
Layer2.Neuron1.Connection1.weight = cW211 = 0.6
Layer2.Neuron1.Connection2.weight = cW212 = 0.4
Layer2.Neuron1.Bias = bW21 = 0.4
LAYER2.Neuron2
Layer2.Neuron2.Connection1.weight = cW221 = 0.9
Layer2.Neuron2.Connection2.weight = cW222 = 0.9
Layer2.Neuron2.Bias = bW22 = 0.5
Step 2: Process the Readings through the Neural Network
a) Provide the Readings to the first layer, and calculate the neuron outputs
The readings provided to the neural network is (0,1), which go straight through to the first layer (layer1).
Starting with Layer 1:
Layer1.INPUT1 = 0
Layer1.INPUT2 =1
Calculate Layer1.Neuron1.NeuronOutput
ConnExit (cEx111) = ConnEntry (cEn111) x Weight (cW111) = 0 x 0.3 = 0;
ConnExit (cEx112) = ConnEntry (cEn112) x Weight (cW112) = 1 x 0.8 = 0.8;
Bias (bEx11) = ConnEntry (1) x Weight (bW11) = 1 x 0.4 = 0.4
NeuronInputValue11 = 0 + 0.8 + 0.4 = 1.2
NeuronOutputValue11 = 1/(1+EXP(-1 x 1.2)) = 0.768525
Calculate Layer1.Neuron2.NeuronOutput
ConnExit (cEx121) = ConnEntry (cEn121) x Weight (cW121) = 0 x 0.1 = 0;
ConnExit (cEx122) = ConnEntry (cEn122) x Weight (cW122) = 1 x 0.1 = 0.1;
Bias (bEx12) = ConnEntry (1) x Weight (bW12) = 1 x 0.2 = 0.2
NeuronInputValue12 = 0 + 0.1 + 0.2 = 0.3
NeuronOutputValue12 = 1/(1+EXP(-1 x 0.3)) = 0.574443
b) Provide LAYER2 with Layer 1 Outputs.
Now lets move to Layer 2:
Layer2.INPUT1 = NeuronOutputValue11 = 0.768525
Layer2.INPUT2 = NeuronOutputValue12 = 0.574443
Calculate Layer2.Neuron1.NeuronOutput
ConnExit (cEx211) = (cEn211) x Weight (cW211) = 0.768525 x 0.6 = 0.461115;
ConnExit (cEx212) = (cEn212) x Weight (cW212) = 0.574443 x 0.4 = 0.229777;
Bias (bEx21) = ConnEntry (1) x Weight (bW21) = 1 x 0.4 = 0.4
NeuronInputValue21 = 0.461115 + 0.229777 + 0.4 = 1.090892
NeuronOutputValue21 = 1/(1+EXP(-1 x 1.090892)) = 0.74855
Calculate Layer2.Neuron2.NeuronOutput
ConnExit (cEx221) = (cEn221) x Weight (cW221) = 0.768525 x 0.1 = 0.076853;
ConnExit (cEx222) = (cEn222) x Weight (cW222) = 0.574443 x 0.1 = 0.057444;
Bias(bEx22) = ConnEntry (1) x Weight (bW22) = 1 x 0.5 = 0.5
NeuronInputValue22 = 0.076853 + 0.057444 + 0.5 = 0.634297
NeuronOutputValue22 = 1/(1+EXP(-1 x 0.634297)) = 0.653463
Step 3) Calculate the delta error for neurons in layer 2
-Because layer 2 is the last layer in this neural network -
we will use the expected output data (1,0) to calculate the delta error.
LAYER2.Neuron1:
Let Layer2.ExpectedOutput1 = eO21 = 1
Layer2.ActualOutput1= aO21 = NeuronOutputValue21= 0.74855
Layer2.Neuron1.deltaError1 = dE21
dE21 = aO21 x (1 - aO21) x (eO21 - aO21)
= (0.74855) x (1 - 0.74855) x (1 - 0.74855)
= (0.74855) x (0.25145) x (0.25145)
= 0.047329
LAYER2.Neuron2:
Let Layer2.ExpectedOutput2 = eO22 = 0
Layer2.ActualOutput2 = aO22 = NeuronOutputValue22 = 0.653463
Layer2.Neuron2.deltaError = dE22
dE22 = aO22 x (1 - aO22) x (eO22 - aO22)
= (0.653463) x (1 - 0.653463) x (0 - 0.653463)
= (0.653463) x (0.346537) x (-0.653463)
= -0.14797
Step 4) Calculate the delta error for neurons in layer 1
LAYER1.Neuron1 delta Error calculation
Let Layer1.Neuron1.deltaError = dE11
Layer1.actualOutput1 = aO11 = NeuronOutputValue11 = 0.768525
Layer2.Neuron1.Connection1.weight = cW211 = 0.6
Layer2.Neuron1.deltaError = dE21 = 0.047329
Layer2.Neuron2.Connection1.weight = cW221 = 0.9
Layer2.Neuron2.deltaError = dE22 = -0.14797
dE11 = (aO11) x (1 - aO11) x ( [cW211 x dE21] + [cW221 x dE22] )
= (0.768525) x (1 - 0.768525) x ([0.6 x 0.047329] + [ 0.9 x -0.14797] )
= -0.01864
LAYER1.Neuron2 delta Error calculation
Let Layer1.Neuron2.deltaError = dE12
Layer1.actualOutput2 = aO12 = NeuronOutputValue12 = 0.574443
Layer2.Neuron1.Connection2.weight = cW212 = 0.4
Layer2.Neuron1.deltaError = dE21 = 0.047329
Layer2.Neuron2.Connection2.weight = cW222 = 0.9
Layer2.Neuron2.deltaError = dE22 = -0.14797
dE12 = (aO12) x (1 - aO12) x ( [cW212 x dE21] + [cW222 x dE22] )
= (0.574443) x (1 - 0.574443) x ([0.4 x 0.047329] + [ 0.9 x -0.14797] )
= -0.02793
Step 5) Update Layer_2 neuron connection weights and bias (with a learning rate (LR) = 0.1)
Layer 2, Neuron 1 calculations:
Let
Layer2.Neuron1.Connection1.New_weight = New_cW211
Layer2.Neuron1.Connection1.Old_weight = Old_cW211 = 0.6
Layer2.Neuron1.Connection1.connEntry = cEn211 = 0.768525
Layer2.Neuron1.deltaError = dE21 = 0.047329
New_cW211 = Old_cW211 + (LR x cEn211 x dE21)
= 0.6 + (0.1 x 0.768525 x 0.047329)
= 0.6 + ( 0.003627)
= 0.603627
Layer2.Neuron1.Connection2.New_weight = New_cW212
Layer2.Neuron1.Connection2.Old_weight = Old_cW212 = 0.4
Layer2.Neuron1.Connection2.connEntry = cEn212 = 0.574443
Layer2.Neuron1.deltaError = dE21 = 0.047329
New_cW212 = Old_cW212 + (LR x cEn212 x dE21)
= 0.4 + (0.1 x 0.574443 x 0.047329)
= 0.4 + (0.002719)
= 0.402719
Layer2.Neuron1.New_Bias = New_Bias21
Layer2.Neuron1.Old_Bias = Old_Bias21 = 0.4
Layer2.Neuron1.deltaError = dE21 = 0.047329
New_Bias21 = Old_Bias21 + (LR x 1 x de21)
= 0.4 + (0.1 x 1 x 0.047329)
= 0.4 + (0.0047329)
= 0.4047329
--------------------------------------------------------------------
Layer 2, Neuron 2 calculations:
Layer2.Neuron2.Connection1.New_weight = New_cW221
Layer2.Neuron2.Connection1.Old_weight = Old_cW221 = 0.9
Layer2.Neuron2.Connection1.connEntry = cEn221 = 0.768525
Layer2.Neuron2.deltaError = dE22 = -0.14797
New_cW221 = Old_cW221 + (LR x cEn221 x dE22)
= 0.9 + (0.1 x 0.768525 x -0.14797)
= 0.9 + ( -0.01137)
= 0.88863
Layer2.Neuron2.Connection2.New_weight = New_cW222
Layer2.Neuron2.Connection2.Old_weight = Old_cW222 = 0.9
Layer2.Neuron2.Connection2.connEntry = cEn222 = 0.574443
Layer2.Neuron2.deltaError = dE22 = -0.14797
New_cW222 = Old_cW222 + (LR x cEn222 x dE22)
= 0.9 + (0.1 x 0.574443 x -0.14797)
= 0.9 + (-0.0085)
= 0.8915
Layer2.Neuron2.New_Bias = New_Bias22
Layer2.Neuron2.Old_Bias = Old_Bias22 = 0.5
Layer2.Neuron2.deltaError = dE22 = -0.14797
New_Bias22 = Old_Bias22 + (LR x 1 x de22)
= 0.5 + (0.1 x 1 x -0.14797)
= 0.5 + (-0.014797)
= 0.485203
--------------------------------------------------------------------------
Step 6) Update Layer_1 neuron connection weights and bias.
Layer 1, Neuron 1 calculations:
Let
Layer1.Neuron1.Connection1.New_weight = New_cW111
Layer1.Neuron1.Connection1.Old_weight = Old_cW111 = 0.3
Layer1.Neuron1.Connection1.connEntry = cEn111 = 0
Layer1.Neuron1.deltaError = dE11 = -0.01864
New_cW111 = Old_cW111 + (LR x cEn111 x dE11)
= 0.3 + (0.1 x 0 x -0.01864)
= 0.3 + ( 0 )
= 0.3
Layer1.Neuron1.Connection2.New_weight = New_cW112
Layer1.Neuron1.Connection2.Old_weight = Old_cW112 = 0.8
Layer1.Neuron1.Connection2.connEntry = cEn112 = 1
Layer1.Neuron1.deltaError = dE11 = -0.01864
New_cW112 = Old_cW112 + (LR x cEn112 x dE11)
= 0.8 + (0.1 x 1 x -0.01864)
= 0.8 + (-0.001864)
= 0.798136
Layer1.Neuron1.New_Bias = New_Bias11
Layer1.Neuron1.Old_Bias = Old_Bias11 = 0.5
Layer1.Neuron1.deltaError = dE11 = -0.01864
New_Bias11 = Old_Bias11 + (LR x 1 x dE11)
= 0.5 + (0.1 x 1 x -0.01864 )
= 0.5 + (-0.001864)
= 0.498136
--------------------------------------------------------------------
Layer 1, Neuron 2 calculations:
Layer1.Neuron2.Connection1.New_weight = New_cW121
Layer1.Neuron2.Connection1.Old_weight = Old_cW121 = 0.1
Layer1.Neuron2.Connection1.connEntry = cEn121 = 0
Layer1.Neuron2.deltaError = dE12 = -0.02793
New_cW121 = Old_cW121 + (LR x cEn121 x dE12)
= 0.1 + (0.1 x 0 x -0.02793 )
= 0.1 + (0)
= 0.1
Layer1.Neuron2.Connection2.New_weight = New_cW122
Layer1.Neuron2.Connection2.Old_weight = Old_cW122 = 0.1
Layer1.Neuron2.Connection2.connEntry = cEn122 = 1
Layer1.Neuron2.deltaError = dE12 = -0.02793
New_cW122 = Old_cW122 + (LR x cEn122 x dE12)
= 0.1 + (0.1 x 1 x -0.02793)
= 0.1 + (-0.002793)
= 0.097207
Layer1.Neuron2.New_Bias = New_Bias12
Layer1.Neuron2.Old_Bias = Old_Bias12 = 0.2
Layer1.Neuron2.deltaError = dE12 = -0.02793
New_Bias12 = Old_Bias12 + (LR x 1 x de12)
= 0.2 + (0.1 x 1 x -0.02793)
= 0.2 + (-0.002793)
= 0.197207
----------------------------------------------------------------------
All done. That was just one training cycle. Thank goodness we have computers !
A computer can process these calculations really quickly, and depending on how complicated your neural network is (ie. number of layers, and number of neurons per layer), you may find that the training procedure may take some time. But believe me, if you have designed it right, it is well worth the wait.
Because once you have the desired weights and bias values set up, you are good to go, and as you receive data, the computer can do a single forward pass in a fraction of a second, and you will get your desired output, hopefully :)
Here is a complete Processing.org script that demonstrates the use of my neural network.
Neural Network (Part 7): Cut and Paste Code (click here).
If you liked my tutorial - please let me know in the comments. It is sometimes hard to know if anyone is actually reading this stuff. If you use my code in your own project, I am also happy for you to leave a link to a YouTube video etc in the comments also.