Ball Balancing Arduino-Style
If you have a good sense of balance, you can ride a unicycle or get on TV doing tricks with ladders. We don’t know if [Hanna Yatco] has a good sense of balance or not, but we do know her Arduino does. Her build uses the ubiquitous HC-SR04 SONAR sensor and a servo.
This is a great use for a servo since a standard servo motor without modifications only moves through part of a circle, and that’s all that’s needed for this project. A PID algorithm measures the distance to the ball and raises or lowers a beam to try to get the ball to the center.
Servos like this usually operate in radio control vehicles and they are very easy to drive. A pot coupled to the shaft generates a pulse that the servo internally compares to a pulse from the microcontroller. If the pulse is wider than the reference pulse, the motor drives in one direction. If the pulse is narrower than the reference, the motor operates in the other direction. Just how much it drives depends on how much difference there is between the two pulses. When the pulses match, the servo motor stops moving. This pulse arrangement is very simple to drive from a logic output on an Arduino or other microcontrollers.
The build details are a bit sparse, but you can see in the video the general layout, and she links to a similar project that inspired this one if you are looking for more details.
You can do the same trick in two dimensions if you prefer. Or perhaps you’d like to try using a time of flight sensor, instead.
Filed under: Arduino Hacks


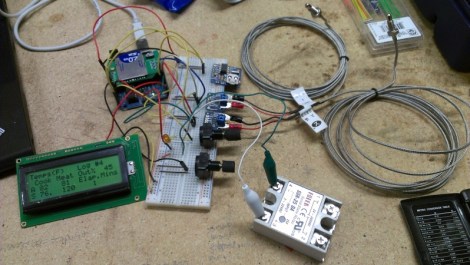
 Taking the form of an Arduino mega-shield that supports a pH meter, a spectrophotometer, and a PID-controlled hot plate, [M. Bindhammer]’s design has a nice cross-section of the instruments needed to start biohacking in your basement. Since the piggybacks on an Arduino, all the data can be logged, and decisions can be made based on the data as it is collected. One example is changing the temperature of the hot plate when a certain pH is reached. Not having to babysit your experiments could be a huge boon to the basement biohacker.
Taking the form of an Arduino mega-shield that supports a pH meter, a spectrophotometer, and a PID-controlled hot plate, [M. Bindhammer]’s design has a nice cross-section of the instruments needed to start biohacking in your basement. Since the piggybacks on an Arduino, all the data can be logged, and decisions can be made based on the data as it is collected. One example is changing the temperature of the hot plate when a certain pH is reached. Not having to babysit your experiments could be a huge boon to the basement biohacker.