Hoverboard motors turned into an RC skater

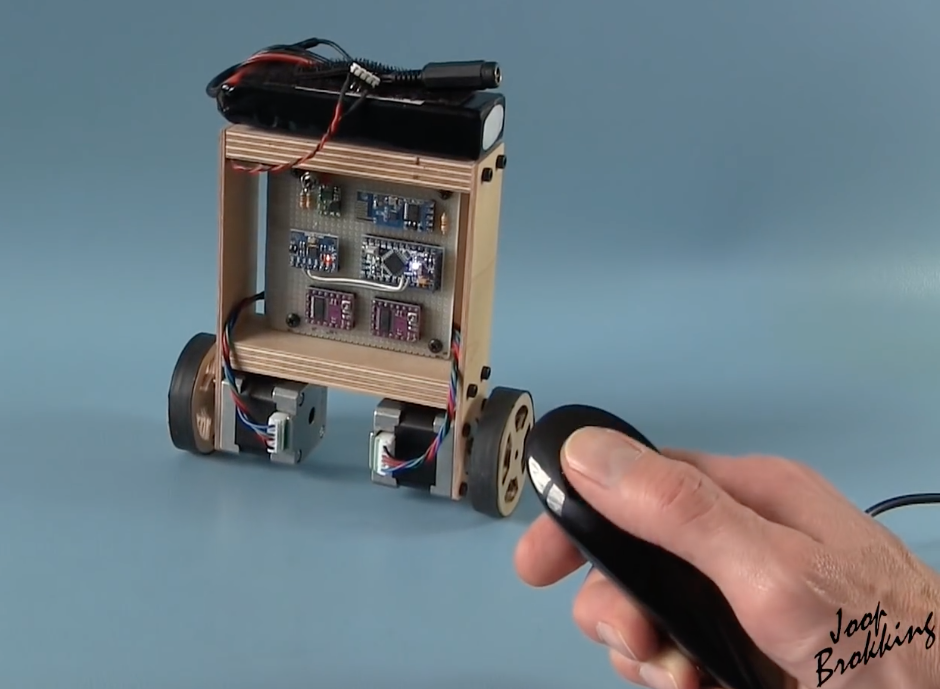
While the hoverboard craze has faded somewhat, the good news is that this means their powerful wheel motors can easily be found on online auction sites. Lukas Kaul took advantage of this component’s availability and created his own “HoverBot,” which as shown in Felix von Drigalski’s video below, acts as something in between a radio-controlled skateboarder and a rather large self-balancing bot.
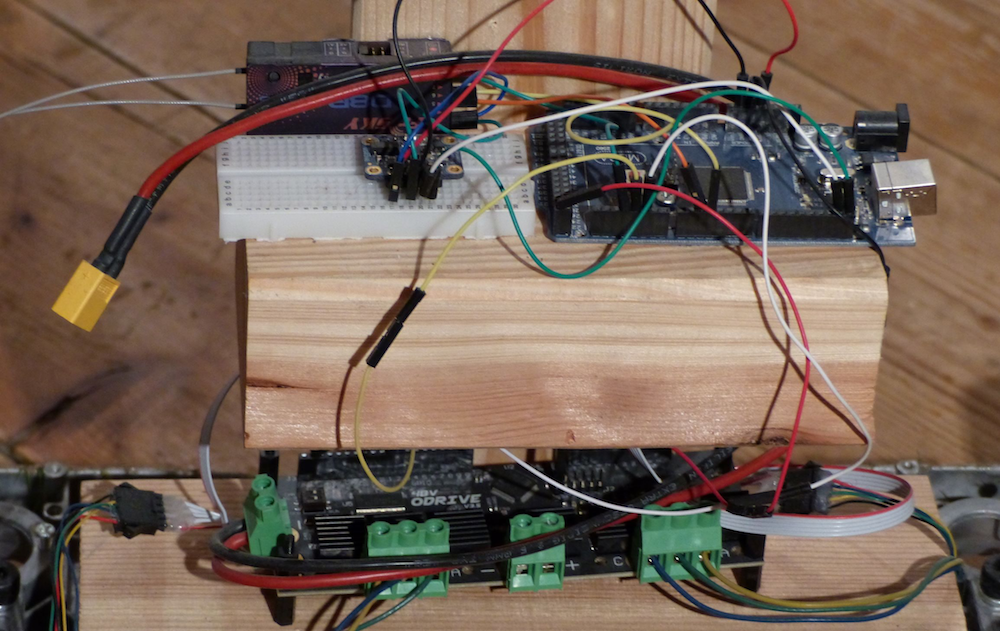
The device is built around an Arduino Mega, which takes input from an RC receiver, along with a Bosch BNO055 IMU, and passes appropriate signals to the motors through an ODrive controller.
The HoverBot is a bit unsteady at high speeds, requiring close operator supervision. However, it looks like a lot of fun, especially when attempting tricks—sometimes successfully—at a skate park.