

3-axis accelerometer motion detector project
Description:
A 3-axis accelerometer sits at the heart of this project to provide a nifty little motion detector. Want to know who is stealing from the cookie jar? Want a simple home intrusion detector? Or to test your partner's driving skills? Then have a look at this:
(Soldering required for this project)
Video:
Parts Required:
Instructions:
Sketch

Freetronics Eleven / Arduino Sketch:
A 3-axis accelerometer sits at the heart of this project to provide a nifty little motion detector. Want to know who is stealing from the cookie jar? Want a simple home intrusion detector? Or to test your partner's driving skills? Then have a look at this:
(Soldering required for this project)
Video:
Parts Required:
- Freetronics Eleven or any compatible Arduino
- Freetronics 3-Axis Accelerometer Module
- Male header pins
- Seeed Studio's Grove Base Shield
- Seeed Studio's Universal Cables
- Seeed Studio's Grove Button
- Seeed Studio's Grove Buzzer
- Mini Breadboard 4.5cm x 3.5cm
- Protoshield and female header pins
- 1 x LED
- 330 ohm resistor
- Wires
- 9V Battery + Battery Clip
Instructions:
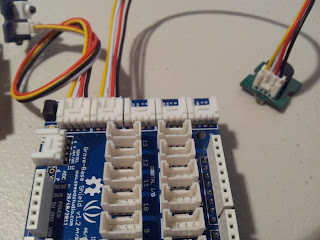
- Overlay the Seeed Studio Base Shield onto the Freetronics Eleven (or compatible Arduino).
- Use a Universal Cable to attach a Seeed Studio Grove Button to Analog Pin 0 on the Base Shield. The socket is located directly above the Freetronics Eleven Power plug, and next to the Reset button on the Base Shield. Please note that Analog Pin 1 is not used by the Grove Button.
- Use a universal Cable to attache a Seeed Studio Grove Buzzer to Analog Pin 1 on the Base Shield. This is the socket next to the one used in Step 2.
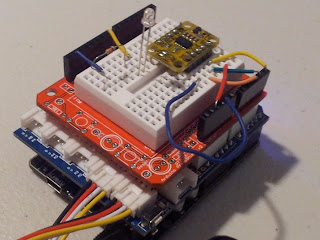
- Solder the female header pins to the Protoboard. Overlay the protoboard onto the Base Shield to create a third layer. I created this layer to tidy up the project and make it a little bit more portable. You could just wire up another breadboard on the side.
- Stick a mini-breadboard (4.5cm x 3.5cm) onto the protoboard. This allows you to use the protoboard for other projects.
- Solder the male headers to the 3-axis accelerometer, and then place it centrally onto the breadboard.
- You need 5 wires to connect:
- GND on protoboard to GND on accelerometer
- 5V on protoboard to VIN on accelerometer
- Analog Pin 3 on protoboard to X on accelerometer
- Analog Pin 4 on protoboard to Y on accelerometer
- Analog Pin 5 on protoboard to Z on accelerometer
- Connect digital pin 8 to an LED and 330 ohm resistor on the breadboard,
- Use a wire to connect the resistor mentioned above to GND on the protoboard
- Connect the USB cable from your computer to the Freetronics Eleven, and upload the Arduino Sketch to the board.
- Disconnect the USB cable, and then power the Freetronics Eleven using a 9V battery and clip.
- When you press the button, it will sound 3 warning sounds before it becomes activated.
- If it detects a vibration or motion that exceeds the tolerance level, it will alarm. The alarm will continue until you either press the Grove button - which resets and reactivates the device or you can press the Reset button on the Base Shield to Stop monitoring for motion.
Sketch



Freetronics Eleven / Arduino Sketch:
1 | //Motion Detector Alarm - Written by ScottC on 2/08/2012 |