Sensor board for underwater ROV
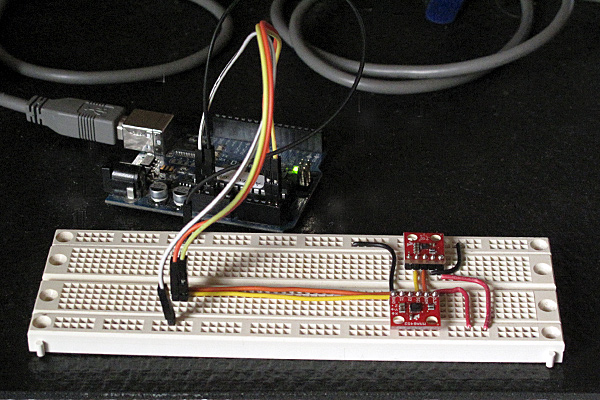
Since I had bought the robotics club an I2C accelerometer and magnetometer, I decided to make a new PC board for them to mount the accelerometer, the magnetometer, and the pressure gauge on the same board. I don’t have the SMD soldering skills to solder all the chips onto one board, and I already had breakout boards for the accelerometer and magnetometer from Sparkfun, so I decided just to put connectors for those breakout boards onto the back of the pressure sensor board. (The back, because the pressure sensor on the front has to be stuck through a hole in the dry box and glued in place.
The new boards are tiny (1.05″ × 1.425″), so I decided to try BatchPCB (which has pricing by the square inch) rather than 4pcb.com (which has fixed pricing per board, up to a fairly large size). The price from BatchPCB was $10 per order plus $2.50/square inch plus $0.90 for shipping, so ordering 3 copies of the board (though I only needed one), cost me $22.12, substantially less than a single board from 4pcb.com, which is $33 plus $17.30 shipping and handling per board (plus an extra $50 if your board has multiple boards on it). The 4pcb price is lower if your board is bigger than about 15.76 square inches, so even my HexMotor boards (at 12.44 square inches) would be cheaper from BatchPCB. If you get multiple boards from 4pcb.com on a single panel and cut them apart yourself, the breakeven point is about 35.76 square inches for a single design (so three HexMotor boards from a single 4pcb.com panel is cheaper than from BatchPCB). For multiple designs on a single panel, the 4pcb.com deal is better: for 3 different designs, a total of 27.04 square inches would make 4pcb.com the cheaper way to go.
If you want a copy of the board, you can order it from BatchPCB, or pick up the Eagle files from my web site and order copies from elsewhere. I’ve put the HexMotor Eagle files on line also, but not put them on the BatchPCB site. I should probably upload them there sometime.
Bottom line: BatchPCB is better for small numbers of tiny boards, but 4pcb.com is better for larger boards and multiple designs.




The BatchPCB orders came back quite quickly (12 days from order to delivery by mail), though I had been worried because their design-rule check, which they say takes minutes had taken about 8 hours. The problem was that each check takes a few minutes, but they had hundreds in the queue over the weekend, and it took a full day to clear the queue.
I had less trouble soldering the pressure gauge this time (this was my second attempt at soldering surface mount devices). You can see in the pictures above that the results are much cleaner than in my first attempt.
The robotics club has tested the pressure sensor on the new board (using their own code on the Arduino) and it seems to work ok, have drilled the hole in the dry box for the port, and glued the sensor board in place using superglue. It seems to be waterproof (at least down to 1 foot—we’ve not tested in deep water yet).
Related articles
- Merged in my Arduino blog (gasstationwithoutpumps.wordpress.com)
- Learning to use I2C (gasstationwithoutpumps.wordpress.com)
- Magnetometer and accelerometer read simultaneously (gasstationwithoutpumps.wordpress.com)
- Magnetometer was not fried (gasstationwithoutpumps.wordpress.com)
- Turning a DIY Project into a Product (spectrum.ieee.org)
- Underwater ROV again this year (gasstationwithoutpumps.wordpress.com)
Tagged: accelerometer, Arduino, BatchPCB, magnetometer, pressure sensor, Printed circuit board, ROV, SparkFun Electronics