

A Robot In A Day
While building a robot (nearly) from scratch isn’t easy, it needn’t be a lengthy process. Is it possible to build a bot in a single day? With some musical motivation (a 10 hour loop of the A-Team theme song), [Tyler Bletsch] answers with a resounding ‘yes’ in the shape of his little yellow robot that he built for a local robotics competition.
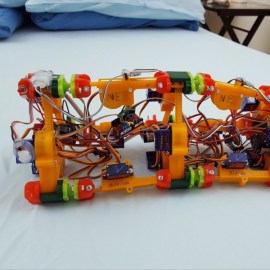
Designing and fabricating on the fly, [Bletsch] used Sketchup to design the chassis, and OpenSCAD to model the wheels while the former was being 3D printed. Anticipating some structural weakness, he designed another version that could bolt to wood if the original failed, but the addition of some metal support rods provided enough stability. Mouse pad material gave the wheels ample traction. An Arduino with the L298 control module receives input via an HC-06 Bluetooth board. Eight AA batteries provide 12V of power to two Nextrox mini 12V motors with an integrated voltmeter to measure battery life.

Lacking a proper drive belt provided a bit of a challenge, so [Bletsch] — in an ingenious expression of resourcefulness — cobbled together an effective solution with some superglue and 3D printing filament packaging; the heat pressed parts proved to be strong and flexible. Waste not maker skills in action!
Arduino code was borrowed from a TerrorBytes student — the organization hosting the competition — and adapted by [Bletsch]. A python script combined with a joystick emulator he made in Google App inventor and some control equations from WPILiB allowed him to control his new robot from his phone.
Whether they are expressing your maker skills, assisting with your luggage or with your board meetings, robots can be a valuable inclusion in everyday life — or just a fun way to spend one day of it.
Filed under: robots hacks












 Version 1 of [Roger]’s robot is only semi-vermiform and is more of
Version 1 of [Roger]’s robot is only semi-vermiform and is more of 




