

This 3D-printed SCARA robot dispenses ball bearings
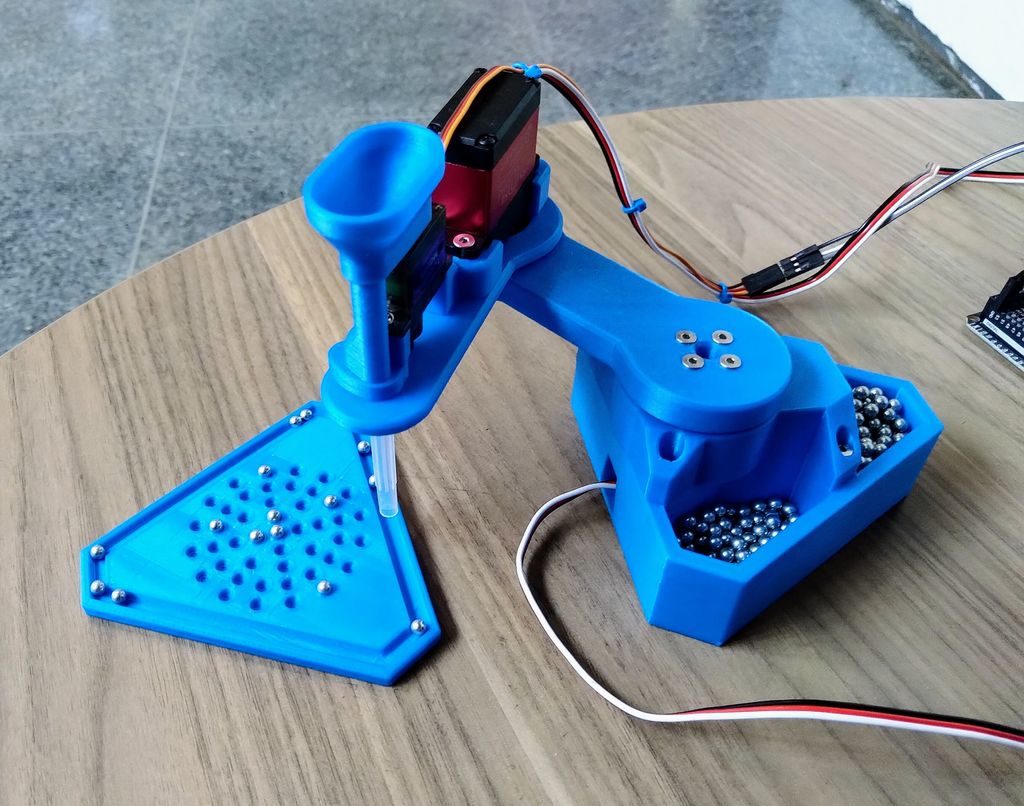
SCARA robots are often used in industrial settings to move components in the proper location. In order to demonstrate the concept to students, Nicholas Schwankl has come up with a simple unit that employs three servos and 3D-printed parts to dispense 4.5mm bearings.
The device runs on an Arduino Mega (though an Uno or other model would work) and as seen in the video below, it twists its ‘shoulder’ and ‘elbow’ joint to position its dispenser tube. Once in place, a micro servo releases a bearing, allowing the tiny steel ball to drop into an empty slot.
STL files, a parts list, and Arduino code are available in the Schwankl’s write-up.
[original story: Arduino Blog]